---
date: 2025-07-02
title: "Gaussian Processes for Regression"
subtitle: "Bayesian Statistics - Nonparametric Methods"
description: "Gaussian Processes Tutorial"
categories:
- Bayesian Statistics
- Nonparametric Methods
keywords:
- Gaussian Processes
- Kriging
- Optimal Interpolation
---
::: {.callout-note}
## Credit
the following material is based on the [Gaussian Processes for Regression](https://tamarabroderick.com/tutorial_2024_cps-fr.html) and tutorial and code by Tamara Broderick. [](https://tamarabroderick.com/tutorial_2025_asa_cirs_webinar.html) Note that the [code](https://github.com/tbroderick/gps_tutorial/blob/2025asa_cirs/demos.ipynb) is under the [MIT license]()
:::
## Why GPs
<!--
::: {#fig-nonparametrics-gps_1 .column-margin group="slides" width="53mm"}

ocean current vector field [Ryan, Özgökmen 2023; Zewe 2023; Gonçalves et al 2019; Lodise et al 2020; Berlinghieri et al 2023]
:::
::: {#fig-nonparametrics-gps_2 .column-margin group="slides" width="53mm"}

rocket booster surrogate model [Gramacy,Lee 2008] [Gramacy 2020]
:::
-->
- Why Gaussian processes (GPs)?
- Example 1:
- The ocean current (velocity vector field) varies by space & time
- Scientists get sparse observations of the current from buoys
- Goal: estimate the current
- c.f. [Ryan, Özgökmen 2023; Zewe 2023; Gonçalves et al 2019; Lodise et al 2020; Berlinghieri et al 2023]
- Challenges:
- Sparse & expensive data, not on a grid
- Current is highly nonlinear but smooth in space-time
- We want uncertainty quantification
- c.f.
- [Gramacy,Lee 2008]
- [Gramacy 2020]
- Example 2: Surrogate model
- The lift force of a rocket booster varies as a function of
- speed at re-entry,
- angle of attack, and
- sideslip angle
- Scientists can run expensive simulations at chosen input settings
- Goal: estimate how lift varies as a function of input settings
- Example 3: learn (& optimize) performance in machine learning as a function of tuning parameters
- c.f. [Snoek et al 2012; 2015; Garnett 2023]
- Motif:
- Sparse, noisy, costly but but smooth data.
- Output may have a nonlinear relationship to the inputs.
- Want uncertainty quantification.
- Low-dimensional inputs.
- Bonus benefits:
- Ease of use (software, tuning)
- Supports optimization of outcome
- Predictions & uncertainties over derivatives & integrals
- Module in more-complex methods
::: {.callout-important icon=false}
#### ⚡ Overthinking parameters in Bayesian nonparametric models
- Let's talk about the elephant in the room nonparametrics do have parameters!
- The classical form of a distribution based on a few fixed number parameters is replaced in these by a notion similar to a euclidean line which can be arbitrary extended. This is the nature of the **nonparametric** parameter vector $\theta$.
- To make the analogy more precise and what the above and many examples illustrate is that we often are interested in some behavior $Y$ but as we get more and more data $X$, we will notice that there are new types of behavior that we did not observe earlier.
:::
## More Examples:
- new species are being daily
- new friend set appear as social networks expand
- new entities appear in images as the data set expands
- new wikipedia articles are discovered as we click on wikilinks
- new alleles are identified as we sequence more genomes
## Roadmap
- A Bayesian approach
- What is a Gaussian process?
- Popular version using a squared exponential kernel
- Gaussian process inference.
- Prediction & uncertainty quantification.
- Goal:
- Learn the mechanism behind standard GPs to identify benefits and pitfalls
## A Bayesian approach
{#fig-nonparametics-posterior .column-margin group="slides" width="53mm"}
{#fig-nonparametics-joint .column-margin group="slides" width="53mm"}
$$
\underbrace{
\mathbb{P}r(unknowns \mid data) }_{
\substack{
\text{Given the data we've seen} \\
\text{what do we know about } \\
\text{the underlying function?}
}
}
\propto
\underbrace{
\mathbb{P}r(data \mid unknowns)
\mathbb{P}r(unknowns)}_{
\substack{
\text{A (statistical) model} \\
\text{that can generate} \\
\text{functions and data} \\
\text{of interest}
}
}
$$
## Multivariate Gaussian using locations {#sec-multivariate-gaussian-locations}
{#fig-nonparametrics-multivariate-gaussian-locations .column-margin group="slides" width="53mm"}
- $M =2$ bivariate Gaussian $[y^{(1)} y^{(2)}] \sim \mathcal{N}(\boldsymbol{\mu}, \boldsymbol{\Sigma})$
- with $\mu = [0,0]^\top$ and $k = \sigma^2 \begin{bmatrix} 1 & \rho \\ \rho & 1\end{bmatrix}$ where $\rho$ is the correlation between the two dimensions.
- What if we let the correlation $\rho$ depend on the input $x$?
- Let $\rho(x)= \rho(\mid x^{(1)} - x^{(2)} \mid)$
- Where the correlation goes to 1 as the x's get close
- And goes to 0 as the x's get far
- Next: Use a Similar setup but an M-long Gaussian instead of just a bivariate
- We have M locations (need not be in order): $X^{(m)} \in \mathbb{R}^d$
- We generate $[y^{(1)}, \ldots,y^{(m)}]^\top \sim \mathcal{N}(\boldsymbol{\mu}, \boldsymbol{K})$
- with
$\mu=0_M$ and
$K$ such that $\mathbf{K}_{ij} = \sigma^2 \rho\mid (x^{(i)}, x^{(j)}\mid)$
- Let's try $\rho(\Delta)=\exp(-\tfrac{1}{2} \Delta^2)$
- $\rho(0)=1$ ,
- $\lim_{\Delta \to \infty} \rho(\Delta)=0$ and
- $\rho(\Delta)$ is monotonically decreasing
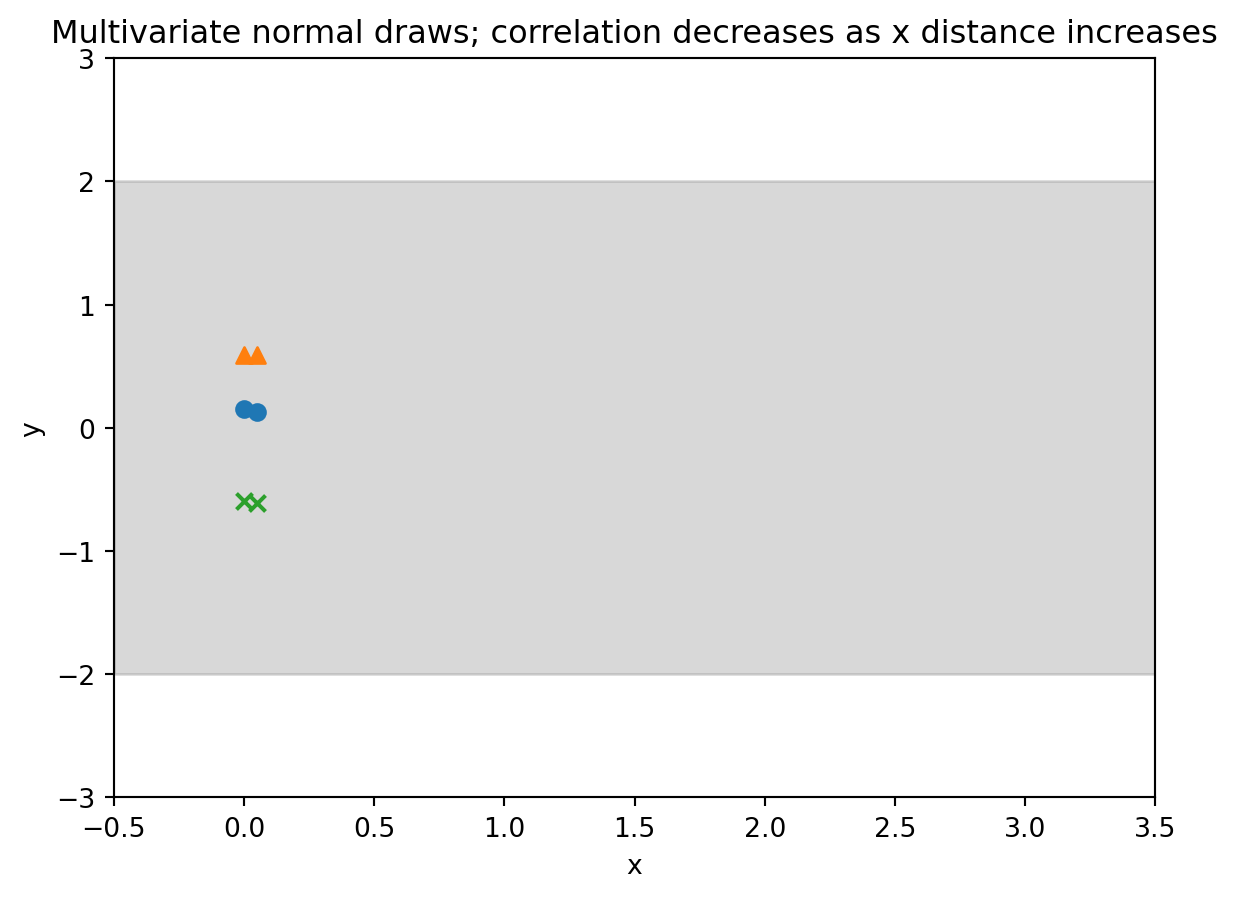
## Demo 1 : Draws from a multivariate normal distribution
```{python}
#| label: lst-demo-01-setup
import numpy as np
import scipy as sp
import matplotlib.pyplot as plt
rng = np.random.RandomState()
from sklearn.gaussian_process import GaussianProcessRegressor
from sklearn.gaussian_process.kernels import RBF
```
```{python}
#| label: fig-demo-01-gp-draws-1
#| fig-cap: "Multivariate normal 2 draws"
signal_stddev = 1.0
kern = signal_stddev**2*RBF(
length_scale=1.0,
length_scale_bounds="fixed") # <1>
n_samples = 3
gp = GaussianProcessRegressor(kernel=kern)
numx=100
xstart=-0.5
xstop=3.5
x=np.linspace(start=xstart,stop=xstop,num=numx)
twosd=2*signal_stddev*np.ones(numx) # <2>
plt.fill_between(x,twosd,-twosd,color="gray",alpha=0.3) # <2>
xdraw=np.array([0.0,0.05]).reshape(-1,1);
y_all_draws=gp.sample_y(xdraw,random_state=rng,
n_samples=n_samples);
marker_collection=["o","^","x"]
for i, ydraw in enumerate(y_all_draws.T):
plt.scatter(
xdraw,ydraw,
marker=marker_collection[np.mod(i,n_samples)]) # <3>
plt.xlim([xstart,xstop]) # <4>
plt.ylim((-3*signal_stddev,3*signal_stddev)) # <4>
pltaxes = plt.gca() # <4>
plt.xlabel("x") # <4>
plt.ylabel("y") # <4>
output = plt.title("Multivariate normal draws; correlation decreases as x distance increases") # <4>
```
1. set the kernel
2. coloring 2 std dev range
3. plotting the draws
4. make the plot
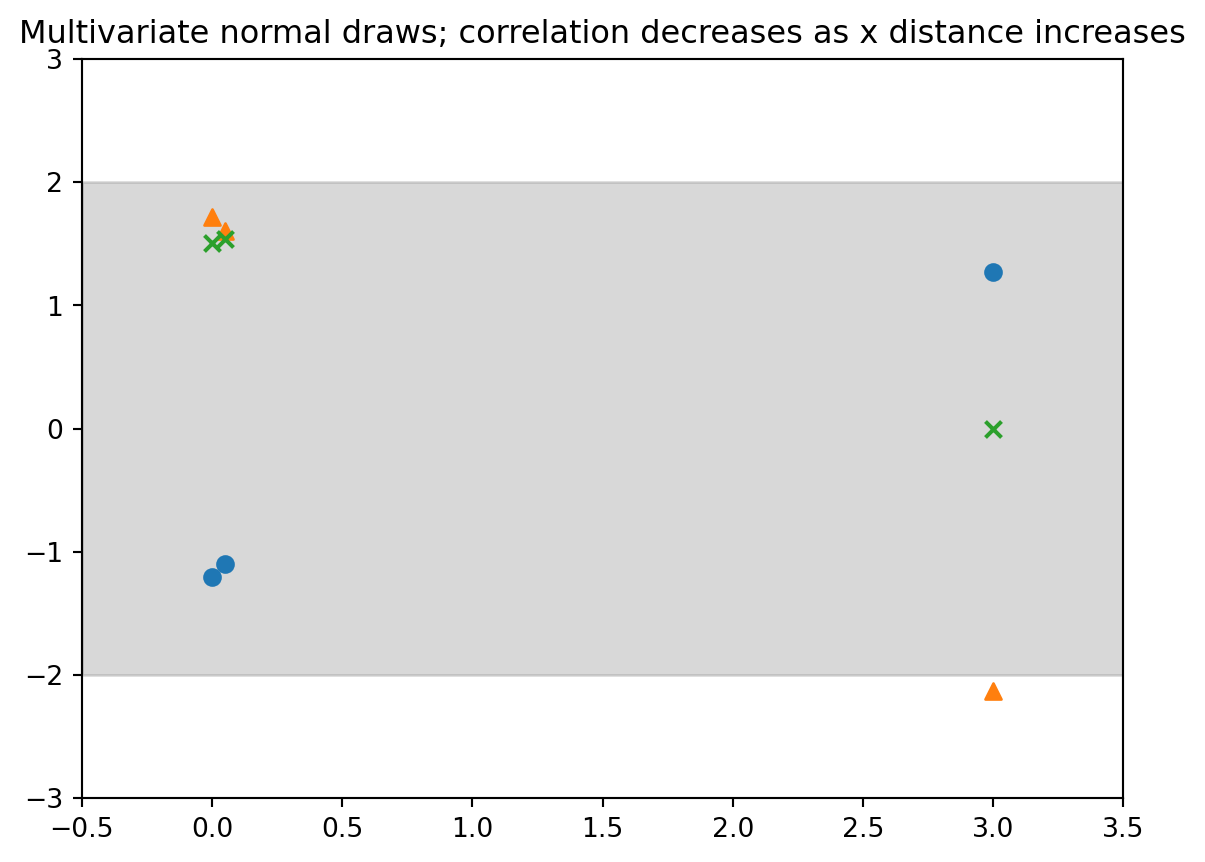
```{python}
#| label: fig-demo-01-gp-draws-2
#| fig-cap: "Multivariate normal three points unevenly spaced"
signal_stddev = 1.0
kern = signal_stddev**2*RBF(
length_scale=1.0,
length_scale_bounds="fixed") # <1>
gp = GaussianProcessRegressor(kernel=kern)
numx=100
xstart=-0.5
xstop=3.5
x=np.linspace(
start=xstart,
stop=xstop,
num=numx)
twosd=2*signal_stddev*np.ones(numx) # <2>
plt.fill_between(x,
twosd,-twosd,
color="gray",
alpha=0.3) # <2>
xdraw=np.array([0.0,0.05,3.0]).reshape(-1,1)
y_all_draws=gp.sample_y(
xdraw,random_state=rng,n_samples=3)
marker_collection=["o","^","x"]
for i, ydraw in enumerate(y_all_draws.T):
plt.scatter(
xdraw,
ydraw,
marker=marker_collection[np.mod(i,3)]) # <3>
plt.xlim([xstart,xstop])
plt.ylim((-3*signal_stddev,3*signal_stddev))
pltaxes = plt.gca() # <4>
output = plt.title("Multivariate normal draws; correlation decreases as x distance increases") # <4>plot
```
1. set the kernel
2. coloring 2 std dev range
3. plotting the draws
4. make the plot
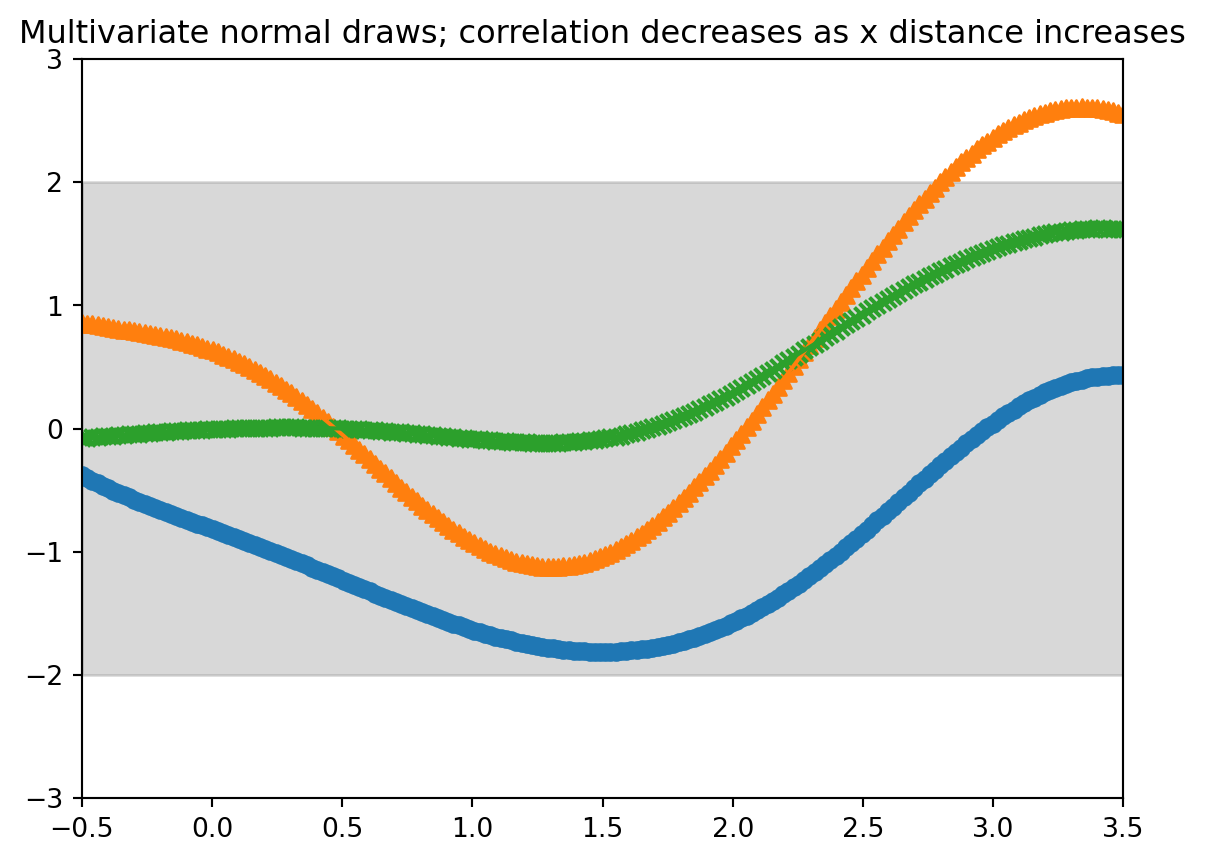
```{python}
#| label: fig-demo-01-gp-draws-3
#| fig-cap: "Multivariate normal 50 point evenly spaced"
signal_stddev = 1.0
kern = signal_stddev**2*RBF(length_scale=1.0,length_scale_bounds="fixed") # set the kernel
gp = GaussianProcessRegressor(kernel=kern)
numx=200
xstart=-0.5
xstop=3.5
x=np.linspace(start=xstart,stop=xstop,num=numx)
twosd=2*signal_stddev*np.ones(numx) # coloring 2 std dev range
plt.fill_between(x,
twosd,-twosd,color="gray",
alpha=0.3) # coloring 2 std dev range
xdraw=np.linspace(
start=xstart,stop=xstop,
num=numx).reshape(-1,1)
y_all_draws=gp.sample_y(
xdraw,random_state=rng,
n_samples=3)
marker_collection=["o","^","x"]
for i, ydraw in enumerate(y_all_draws.T):
plt.scatter(xdraw,ydraw,marker=marker_collection[np.mod(i,3)])
plt.plot(xdraw,ydraw) # plotting the draws
plt.xlim([xstart,xstop])
plt.ylim((-3*signal_stddev,3*signal_stddev))
pltaxes = plt.gca() # make the plot
output = plt.title("Multivariate normal draws; correlation decreases as x distance increases") # make the plot
```
we just drew random functions from a type of "Gaussian process"!
## Gaussian processes {#sec-gaussian-processes}
- Definition: "A Gaussian process is a collection of random variables, any finite number of which have a joint Gaussian distribution." -- [@rasmussen2006gaussian]
- E.g. the function is a collection indexed by input $x$:
$$
f(x) \sim \mathcal{GP}(m, k)
$$
- It is specified by its mean function and covariance function:
- Mean function $m(x)=E[f(x)]$
- Covariance function (a.k.a. kernel) $k(x,x')=\mathbb{E}[(f(x) - m(x))(f(x') - m(x'))]$
- A common default (e.g. in software) is $m(x)=0$
- One very commonly used covariance function is the squared exponential or radial basis function (RBF)
- We'll see a more general form later, but for now we're using: $k(x, x') = \sigma^2 \exp\left(-\frac{1}{2} \|x - x'\|^2\right)$
- For now, assume data is observed without noise
Let's look at a draw from the Gaussian process, i.e. we are just generating synthetic data from the Gaussian process model.
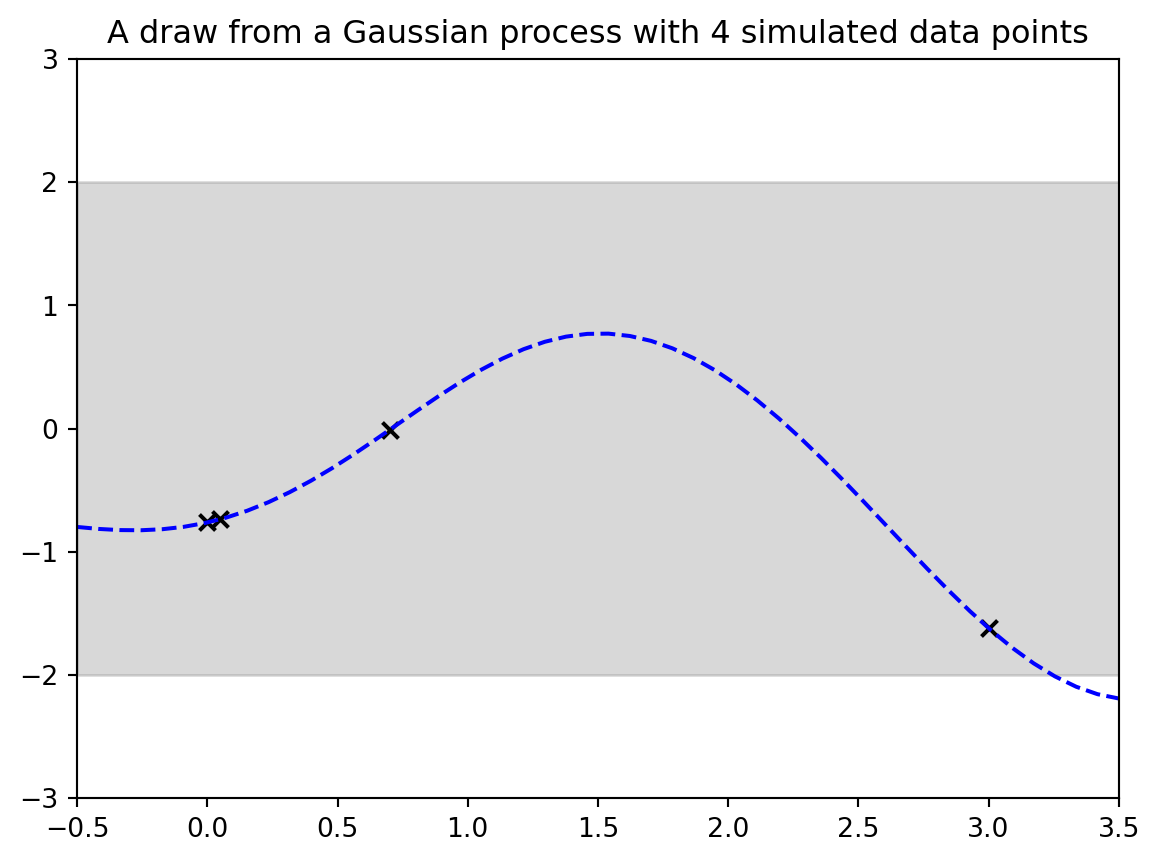
## Demo 2: Draw from a Gaussian process
```{python}
#| label: fig-demo-01-gp-draws-4
signal_stddev = 1.0;
kern = signal_stddev**2*RBF(
length_scale=1.0,
length_scale_bounds="fixed") # set the kernel
gp = GaussianProcessRegressor(kernel=kern)
xobs = np.array([0.0,0.05,0.7,3.0]);
Nobs = xobs.shape[0]
numx=50;
xstart=-0.5;
xstop=3.5; x=np.linspace(
start=xstart,stop=xstop,num=numx);
twosd=2*signal_stddev*np.ones(numx) # coloring 2 std dev range
plt.fill_between(
x,
twosd,
-twosd,
color="gray",
alpha=0.3) # coloring 2 std dev range
xcurve=np.linspace(start=xstart,stop=xstop,num=numx);
xall = np.concatenate((xcurve,xobs)).reshape(-1,1)
yall = gp.sample_y(xall,random_state=rng,n_samples=1);
ycurve=yall[0:numx];
yobs=yall[numx:numx+Nobs]
plt.plot(xcurve,ycurve,linestyle="dashed",color="blue");
plt.scatter(xobs,yobs,color="black",marker="x")
plt.xlim([xstart,xstop]);
plt.ylim((-3*signal_stddev,3*signal_stddev));
pltaxes = plt.gca() # make the plot
output = plt.title("A draw from a Gaussian process with " + str(Nobs) + " simulated data points") # make the plot
```
```{python}
#| label: fig-demo-01-gp-draws-5
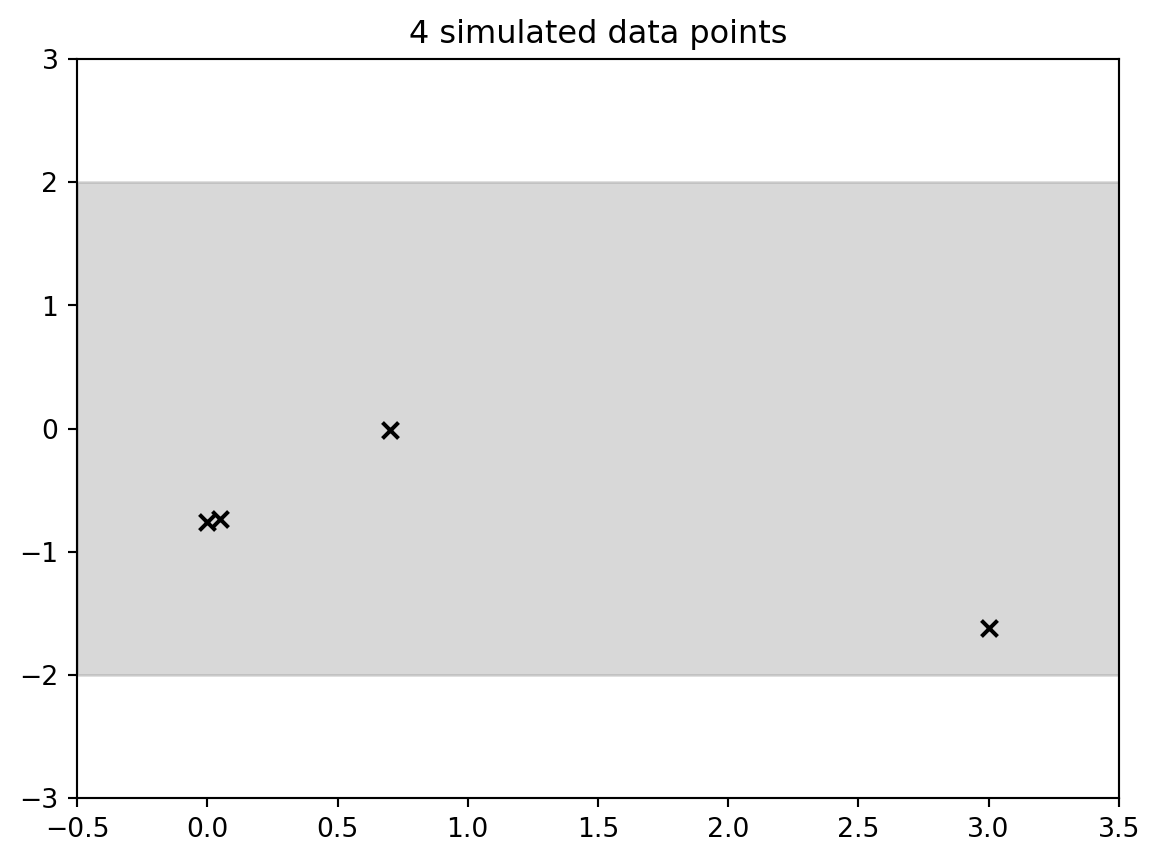
#| fig-cap: "A draw from a Gaussian process with 4 simulated data points"
# just the training data
plt.fill_between(x,twosd,-twosd,color="gray",alpha=0.3) # coloring 2 std dev range
plt.scatter(xobs,yobs,color="black",marker="x")
plt.xlim([xstart,xstop]); plt.ylim((-3*signal_stddev,3*signal_stddev)); pltaxes = plt.gca() # make the plot
output = plt.title(str(Nobs) + " simulated data points") # make the plot
```
## Note on "dimension" of the input
<!--placeholder image-->
{#fig-nonparametrics-dimension-data .column-margin group="slides" width="53mm"}
{#fig-nonparametrics-dimension-item .column-margin group="slides" width="53mm"}
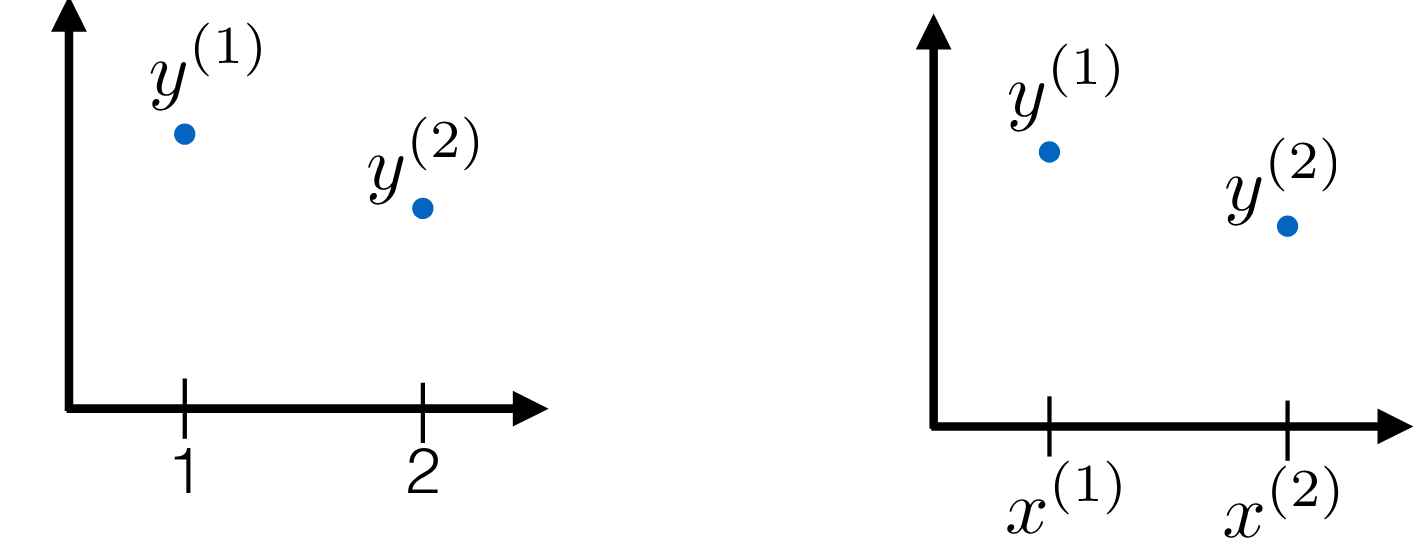
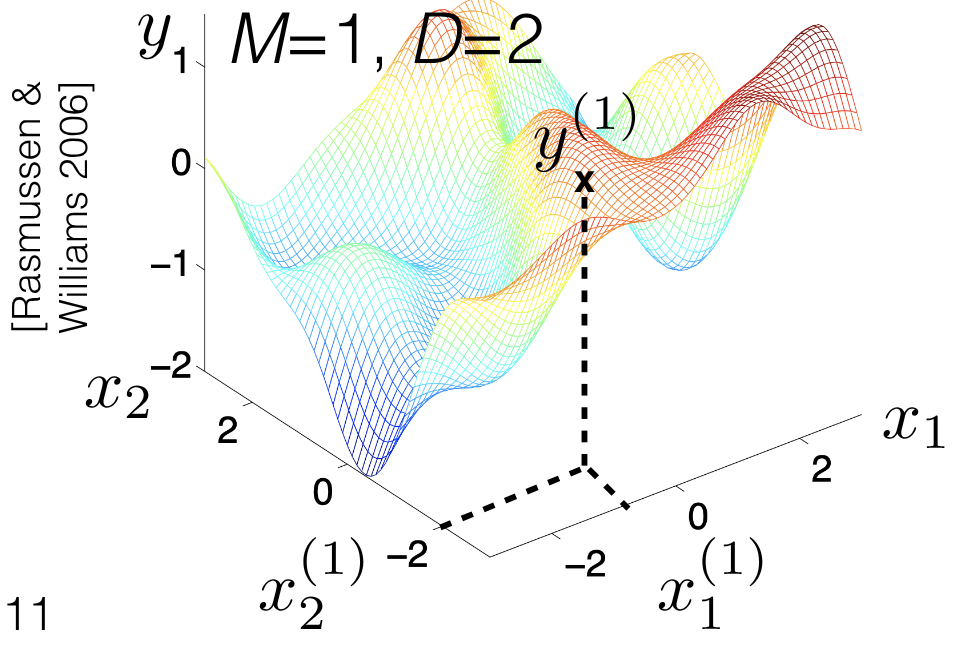
- Let's be careful to separate two types of "dimension"
- We're using a superscript $y^{(1)}$ to denote (M or N) number of points in the space
- We'll use a subscript for the (D) different elements of a point's vector
- Note: all of our real-life examples from the start had number of inputs $D > 1$
- $D = 1$ is much easier to visualize, but might not be representative.
## Inference about Unknowns given data.
- Let $X$ collect the N "training" data points (indexed 1 to N)
- Let $X'$ collect the M "test" data points $X: N\times D$
- Where we want to evaluate the function
- Indexed $N+1:N+M$
- $K(X,X')$ os the $N \times M$ matrix with (n,m) entry $k(x^{(n)}, x^{(N+m)})$
- Then by our model (dimension are annotated in blue)
$$
\begin{bmatrix}
\overbrace{f(X)}^{\color{blue}N\times 1} \\
\underbrace{f(X')}_{\color{blue}M\times 1}
\end{bmatrix}
\sim \mathcal{N}
\left(
\underbrace{
\begin{bmatrix}
0_N \\
0_M
\end{bmatrix}}_{\color{blue}(N+M)\times 1 } ,
\underbrace{
\begin{bmatrix}
K(X, X) & K(X, X') \\
K(X', X) & K(X', X')
\end{bmatrix}}_{
\color{blue}(N+M)\times (N+M)
}
\right)
$$
- The conditional satisfies $f(X')\mid f(X), X, X' \sim \mathcal{N}$
- Can compute mean ($\color{blue}M\times 1$) & covariance ($\color{blue}M\times M$) in closed form with Gaussian facts
$$
\begin{aligned}
k(x, x') = \sigma^2 \exp\left(-\tfrac{1}{2}(x - x')^2\right), \sigma^2 = 1
\end{aligned}
$$
Now we can flip this around using the Bayesian machinery and use that to get information. When we don't know the function, but we do know the data, which is real life. In real life You know the data, but you don't know the function and you're trying to learn that direction.
If we want to draw a curve we need M to be very large. And we will need to generate a $M \times D$ matrix of points.
So now what we're going to do is we're going to run Gaussian process regression on those points. And what do I mean by, say, running Gaussian process regression I'm literally talking about exactly what we just did on the slide together.
```{python}
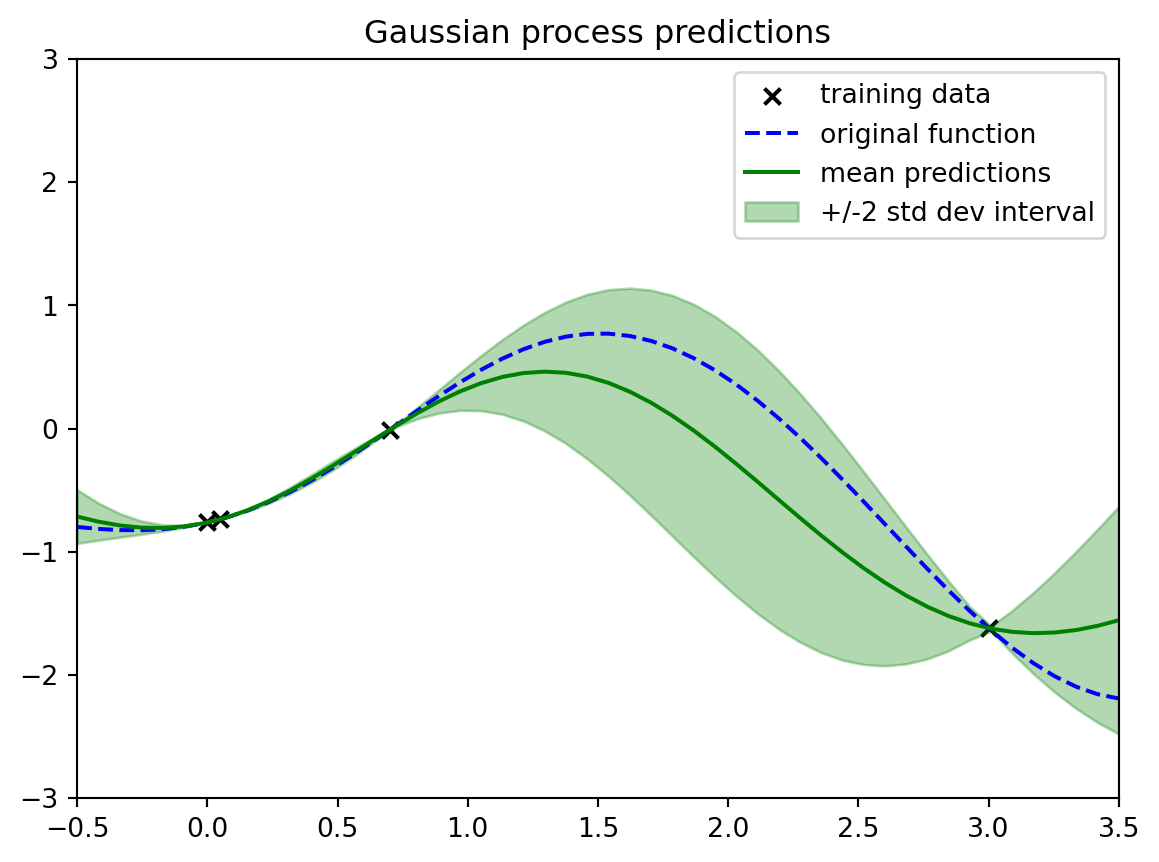
#| label: fig-demo-01-gp-predict
#| fig-cap: "Gaussian process predictions"
gpfit = GaussianProcessRegressor(
kernel=kern, optimizer=None) # <1>
gpfit.fit(xobs.reshape(-1,1),yobs.reshape(-1,1))
mean_pred, stddev_pred = gpfit.predict(
xcurve.reshape(-1,1),
return_std=True)
plt.scatter(
xobs,yobs,color="black",
marker="x", label="training data")
plt.plot(
xcurve,ycurve,linestyle="dashed",
color="blue", label="original function")
plt.plot(
xcurve,mean_pred,color="green",
label="mean predictions")
plt.fill_between(
xcurve,mean_pred-2*stddev_pred,
mean_pred+2*stddev_pred,color="green",
alpha=0.3,label=r"+/-2 std dev interval")
plt.legend();
plt.xlim([xstart,xstop]);
plt.ylim((-3*signal_stddev,3*signal_stddev));
plotout = plt.title("Gaussian process predictions")
```
1. NOT fitting kernel hyperparameters
We're saying hey jointly You can think of the joint distribution of the value of the value of the Gaussian process at all of these different X locations, all of these different horizontal locations.
What we would have is we would have everything else. In this plot we'd have The black X's, that's our observed data. So we totally know that.
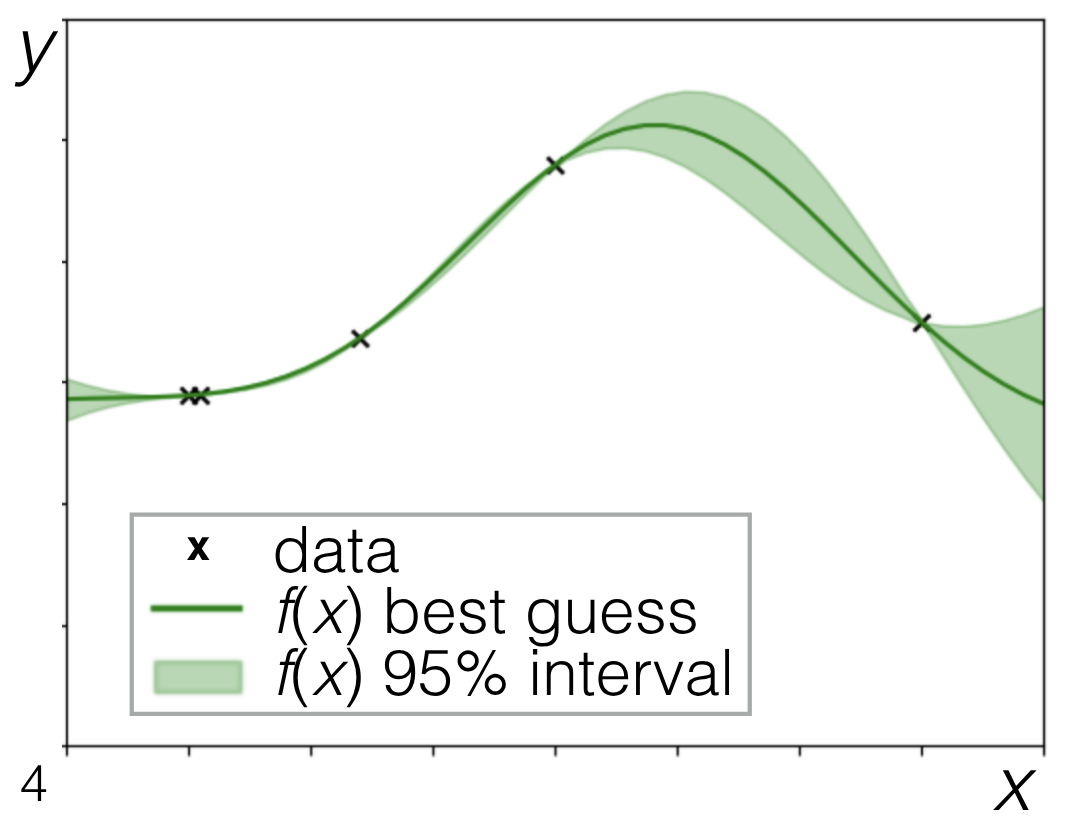
- We have:
- Our observed data, the black X's, which is our training data.
- Our predictions. that is the solid green line it is the mean of the Gaussian process at all of these different X locations away from the observations. We are creating it just like we created our draws or like we created our, our big prior Gaussian process before.
- We're saying, hey, what's the mean? In this case, it's non-trivial. It's not just zero because it's conditioned on the data.
- We have our uncertainties, our plus or minus two standard deviation interval.
Now, before, this was pretty boring.
When we were first generating things a priori when we didn't have any data.
The plus or minus two standard deviation interval is just plus or minus two everywhere.
Now, because we've observed some data, it's not trivial. We're actually seeing that it differs depending on where we are in the space.
And I just want to point out some things that might be considered useful about this.
1. When I'm really near my data points
- we see there's very little uncertainty.
- very little uncertainty going between them.
Because this is basically the only way we can smoothly and quickly go between these two points.
2. when we get much farther away we have a lot of uncertainty because there's a good number of different ways that we could have gotten between these two points. It makes sense that our uncertainty would be larger As we get farther away.
```{python}
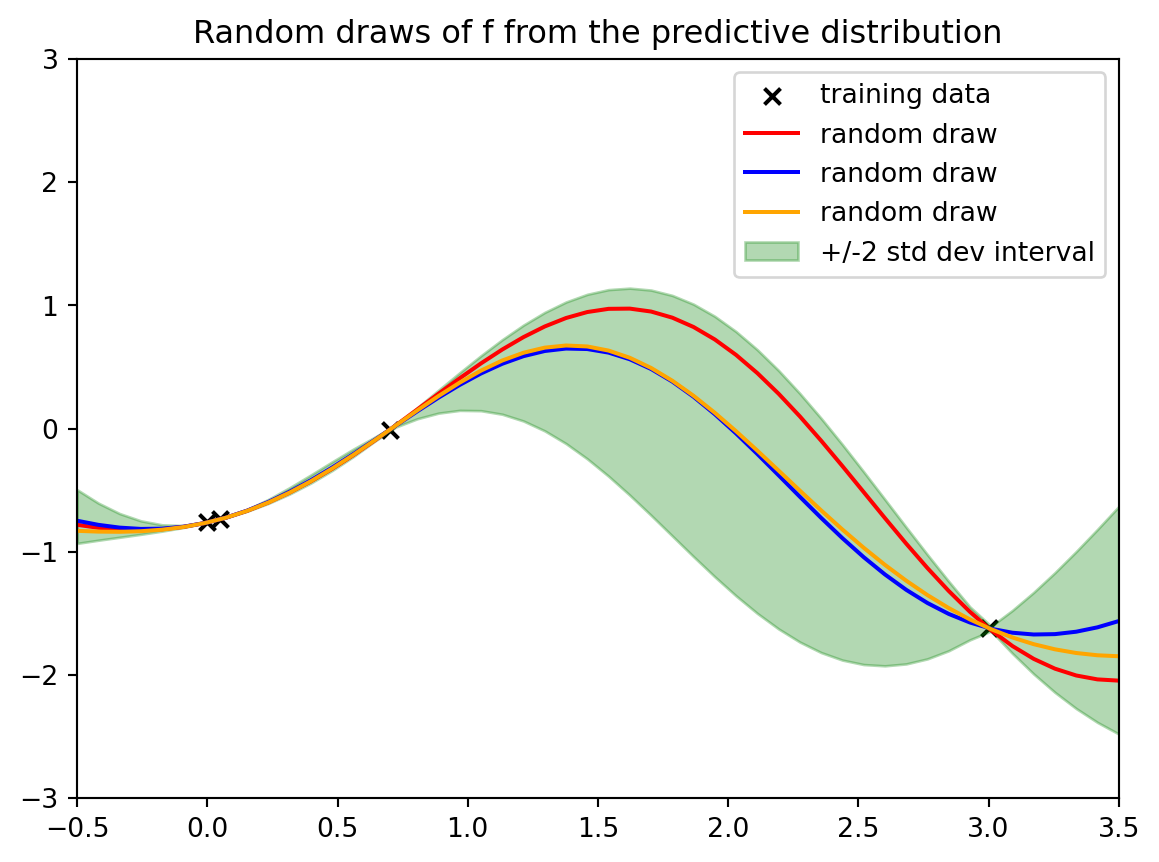
#| label: fig-demo-01-gp-predict-2
#| fig-cap: "Gaussian process predictions with noise"
gpfit = GaussianProcessRegressor(kernel=kern, optimizer=None) # <1>
gpfit.fit(xobs.reshape(-1,1),yobs.reshape(-1,1))
mean_pred, stddev_pred = gpfit.predict(xcurve.reshape(-1,1), return_std=True)
y_all_draws=gpfit.sample_y(xcurve.reshape(-1,1),random_state=rng,n_samples=3)
color_options=["red","blue","orange"]
plt.scatter(xobs,yobs,color="black",marker="x", label="training data")
for i, ydraw in enumerate(y_all_draws.T):
plt.plot(xcurve,ydraw,label="random draw",color=color_options[np.mod(i,3)])
plt.fill_between(
xcurve,mean_pred-2*stddev_pred,mean_pred+2*stddev_pred,
color="green",alpha=0.3,label=r"+/-2 std dev interval")
plt.legend();
plt.xlim([xstart,xstop]);
plt.ylim((-3*signal_stddev,3*signal_stddev));
plotout = plt.title("Random draws of f from the predictive distribution")
```
1. NOT fitting kernel hyperparameters
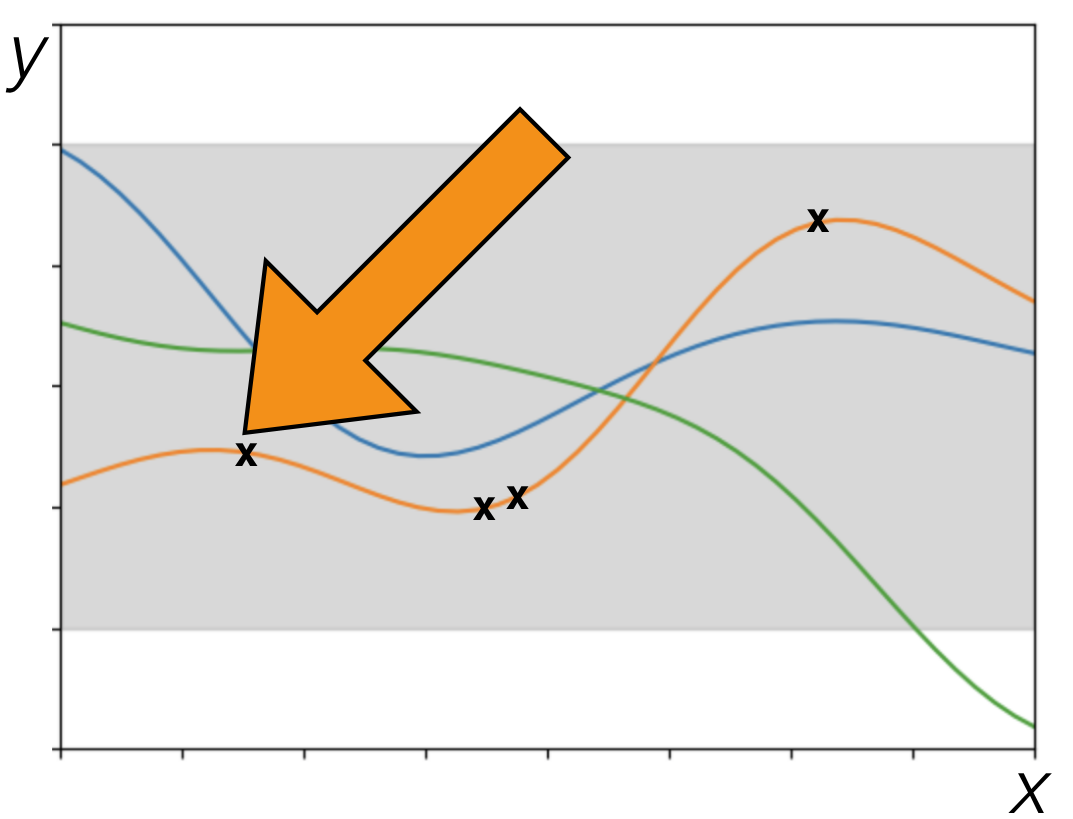
Now we have these four data points. And so we've constrained our random draws of the functions to go through the four data points.
And here are just three draws from it. Because again, it's just a multivariate Gaussian is all that we're doing here. We're just making this multivariate Gaussian the same way we did before by having draws at many dense $x$ values at many dense input values. And so we can do the same thing here. It's just a different multivariate Gaussian.
This is meant to express Our uncertainty and our best guess, our best guess could be seen as this mean This posterior mean. So these are the mean predictions this solid green line. So that could be thought of as our best guess. And then our uncertainty around that
Is the plus or minus two standard deviation interval conditional on the data that we've seen. And now we're going to dig a little bit more. Into some choices we've made and what are their implications.
## Squared exponential kernel revisited {#sec-squared-exponential-kernel-revisited}
What if we happened to measure our data on a different scale?
We've been using this particular kernel:
$$
\begin{aligned}
k(x, x') &= \sigma^2 \exp\left(-\tfrac{1}{2}(x - x')^2\right), \sigma^2 = 1
\end{aligned}
$$
- What do we expect from the scale of $f(x)$ a priori?
- At one $x$, with $~95%$ probability a priori, $f(x)$ is in the interval $[-2\sigma, \sigma]$.
- Marginal variance cannot increase with data
- What counts as "close" in x?
$$
\exp(-\tfrac{1}{2}(2)^2) \approx 0.14 \quad
\exp(-\tfrac{1}{3}(3)^2) \approx 0.11 \quad
\exp(-\tfrac{1}{2}(4)^2) \approx 0.0034 \quad
$$
```{python}
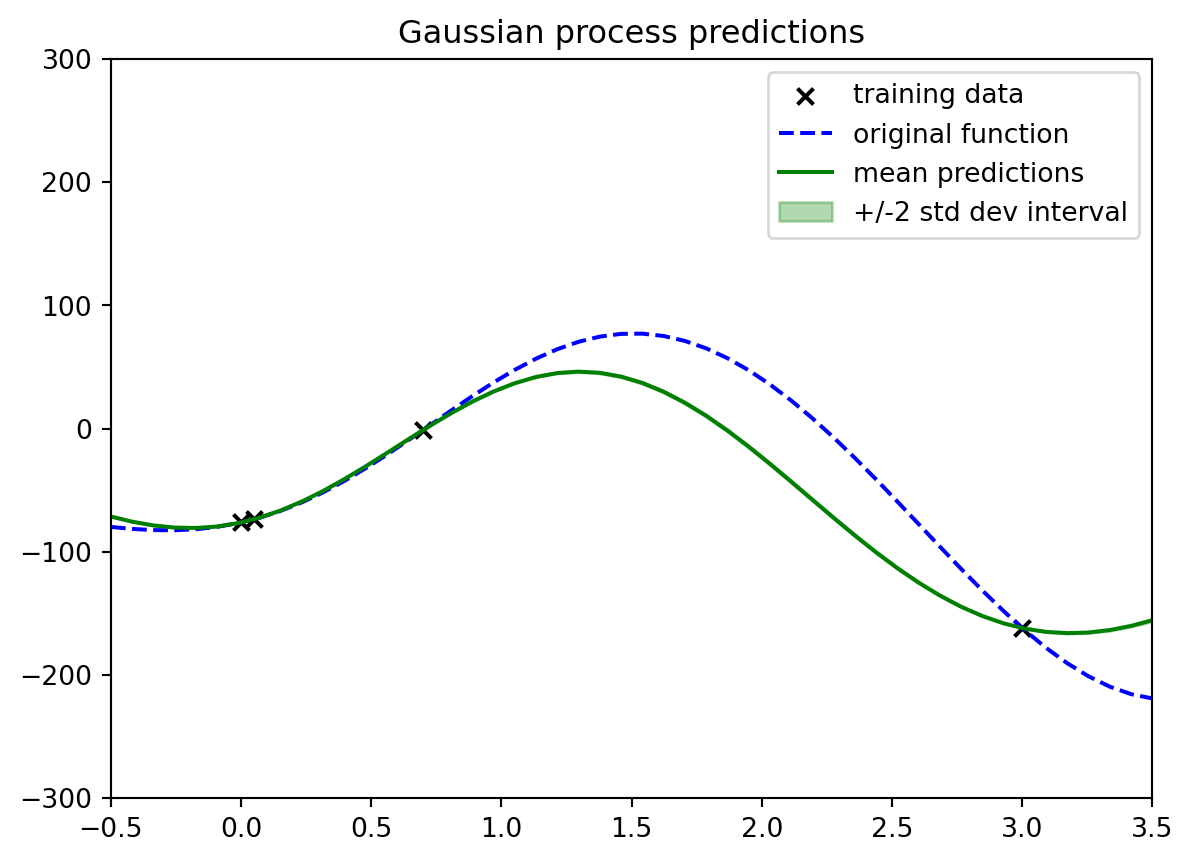
#| label: fig-demo-01-gp-predict-3
#| fig-cap: "issues when we scale the y values by 100"
# observed y values are 100 times what they were in the nice example
gpfit = GaussianProcessRegressor(
kernel=kern, optimizer=None) # <1>
gpfit.fit(xobs.reshape(-1,1),
100*yobs.reshape(-1,1))
mean_pred, stddev_pred = gpfit.predict(
xcurve.reshape(-1,1),
return_std=True)
plt.scatter(xobs,100*yobs,color="black",
marker="x", label="training data")
plt.plot(xcurve,100*ycurve,linestyle="dashed",
color="blue", label="original function")
plt.plot(xcurve,mean_pred,color="green",
label="mean predictions")
plt.fill_between(
xcurve,
mean_pred-2*stddev_pred,mean_pred+2*stddev_pred,
color="green",alpha=0.3,
label=r"+/-2 std dev interval")
plt.legend();
plt.xlim([xstart,xstop]);
plt.ylim(
(-100*3*signal_stddev, 100*3*signal_stddev));
plotout = plt.title("Gaussian process predictions")
```
1. NOT fitting kernel hyperparameters
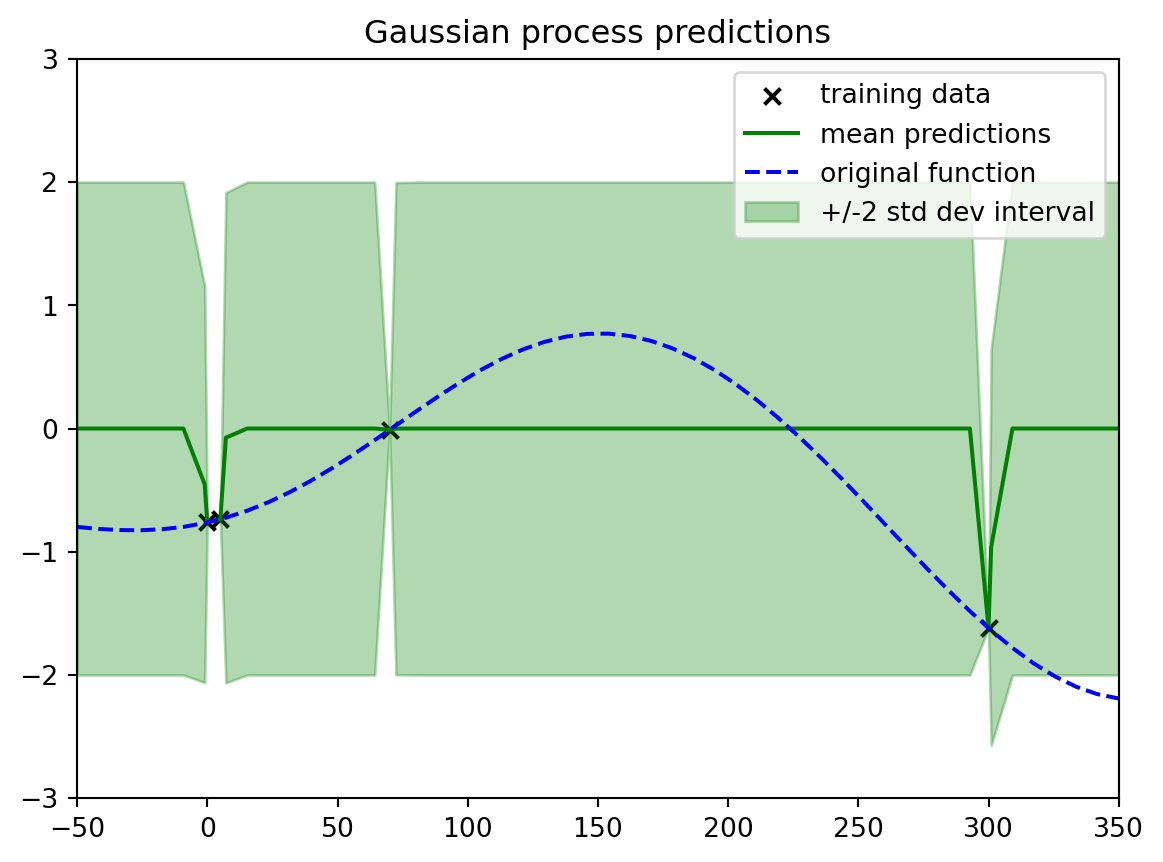
In this sample the $+/-2 \sigma$ confidence interval is now 100 times smaller than in the nice example, and the mean prediction is also 100 times smaller than in the nice example. So while it is still there it seems to have vanished.
```{python}
#| label: fig-demo-01-gp-predict-4
#| fig-cap: "Issue when we scale the x values by 100"
# observed x values are 100 times what they were in the nice example
gpfit = GaussianProcessRegressor(
kernel=kern, optimizer=None) # NOT fitting kernel hyperparameters
gpfit.fit(100*xobs.reshape(-1,1),yobs.reshape(-1,1))
xall=np.sort(np.concatenate((xcurve,xobs)))
mean_pred, stddev_pred = gpfit.predict(
100*xall.reshape(-1,1),
return_std=True)
plt.scatter(100*xobs,
yobs,color="black",marker="x",
label="training data")
plt.plot(
100*xall,mean_pred,
color="green", label="mean predictions")
plt.plot(
100*xcurve,ycurve,
linestyle="dashed",
color="blue",
label="original function")
plt.fill_between(
100*xall,mean_pred-2*stddev_pred,
mean_pred+2*stddev_pred,color="green",
alpha=0.3,label=r"+/-2 std dev interval")
plt.legend();
plt.xlim([100*xstart,100*xstop]);
plt.ylim((-3*signal_stddev,3*signal_stddev));
plotout = plt.title("Gaussian process predictions")
```
in this example the points are now so far apart that at most point on the graph we are quickly jumping to the prior and getting the maximum uncertainty.
```{python}
#| label: lst-estimation
print(np.exp(-0.5*2.0**2))
```
- What can we do to handle different x and f(x) scales?
- Normalization in y can help; in x, can still be hiccups
- A common option in practice and in software is to fit the hyperparameters of a more general squared exponential kernel from data
- More general form of the squared exponential:
$$
k(x, x') = \underbrace{\sigma^2}_{\color{red}\text{signal variance}} \exp\left(-\frac{1}{2}\sum_{d=1}^D \frac{(x_d - x'_d)^2}{\underbrace{l_d^2}_{\color{red}\text{length scale}}}\right), \sigma^2 = 1
$$ {#eq-squared-exponential-kernel-general}
- Parameters (here, f) parametrize the distribution of the data. If we knew them, we could generate the data.
- GPs: *nonparametric* model: infinite # of latent params
- *Hyperparameters* parametrize the distribution of the
parameters. If known, we could generate the parameters.
- Algorithm:
- Fit a value for the hyperparameters using the data.
- Given those values, now compute and report the mean and uncertainty intervals
### Demo 3 -- Learning the signal and the length scale and
```{python}
#| label: fig-demo-03-gp-data-and-ground-truth
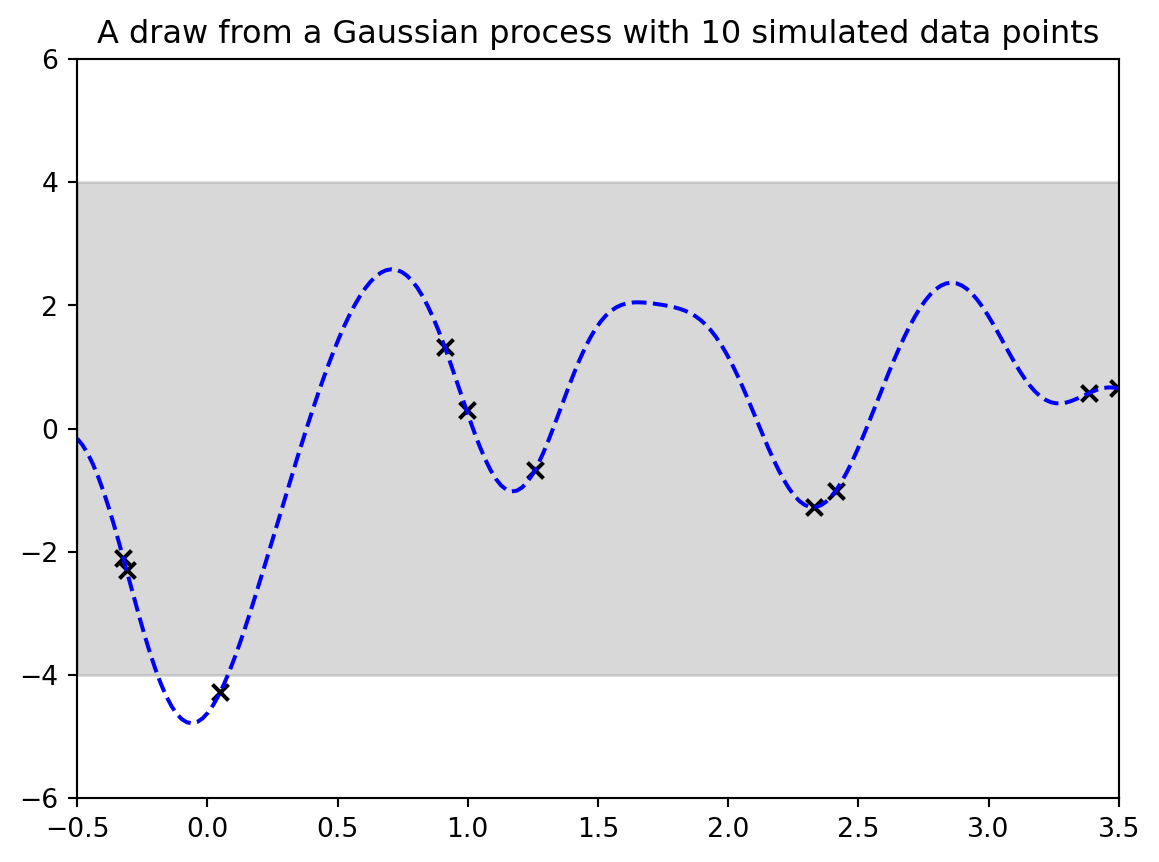
#| fig-cap: "A draw from a Gaussian process with 10 simulated data points"
signal_stddev = 2.0;
kern = signal_stddev**2*RBF(
length_scale=0.3,
length_scale_bounds="fixed") # set the kernel
gp = GaussianProcessRegressor(kernel=kern)
xstart=-0.5;
xstop=3.5;
Nobs = 10;
xobs = rng.uniform(xstart,xstop,size=Nobs)
numx=200;
x=np.linspace(start=xstart,stop=xstop,num=numx);
twosd=2*signal_stddev*np.ones(numx) # coloring 2 std dev range
plt.fill_between(x,twosd,-twosd,color="gray",alpha=0.3) # coloring 2 std dev range
xcurve=np.linspace(start=xstart,stop=xstop,num=numx);
xall = np.concatenate((xcurve,xobs)).reshape(-1,1)
yall = gp.sample_y(xall,random_state=rng,n_samples=1);
ycurve=yall[0:numx];
yobs=yall[numx:numx+Nobs]
plt.plot(xcurve,ycurve,linestyle="dashed",color="blue");
plt.scatter(xobs,yobs,color="black",marker="x")
plt.xlim([xstart,xstop]);
plt.ylim((-3*signal_stddev,3*signal_stddev));
pltaxes = plt.gca() # make the plot
output = plt.title(
"A draw from a Gaussian process with " + str(Nobs) +
" simulated data points") # make the plot
```
we have drawn 10 points and the ground truth
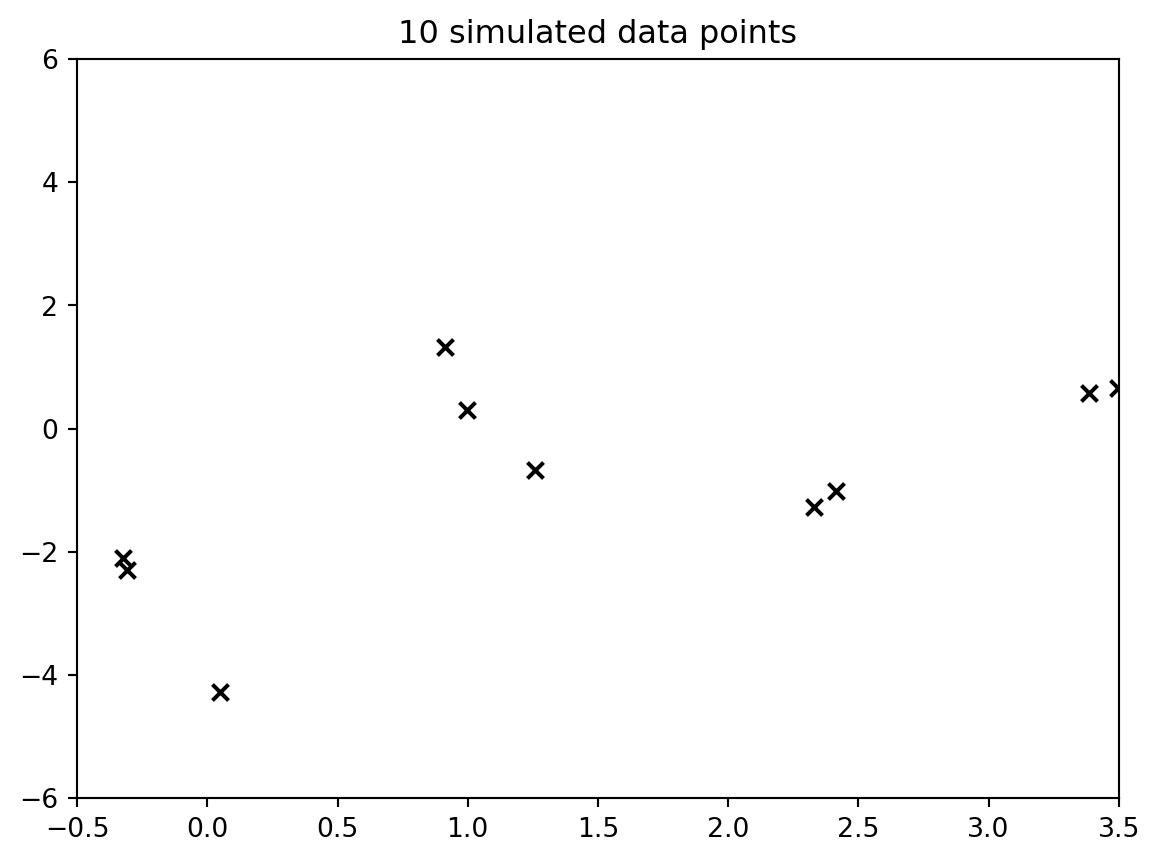
but what goes to the algorithm is just the data points as follows:
```{python}
#| label: fig-demo3-gp-data
#| fig-cap: "the data"
# just the training data
plt.scatter(xobs,yobs,color="black",marker="x")
plt.xlim([xstart,xstop]); plt.ylim((-3*signal_stddev,3*signal_stddev)); pltaxes = plt.gca() # make the plot
output = plt.title(str(Nobs) + " simulated data points") # make the plot
```
```{python}
#| label: fig-demo3-gp-algorithm
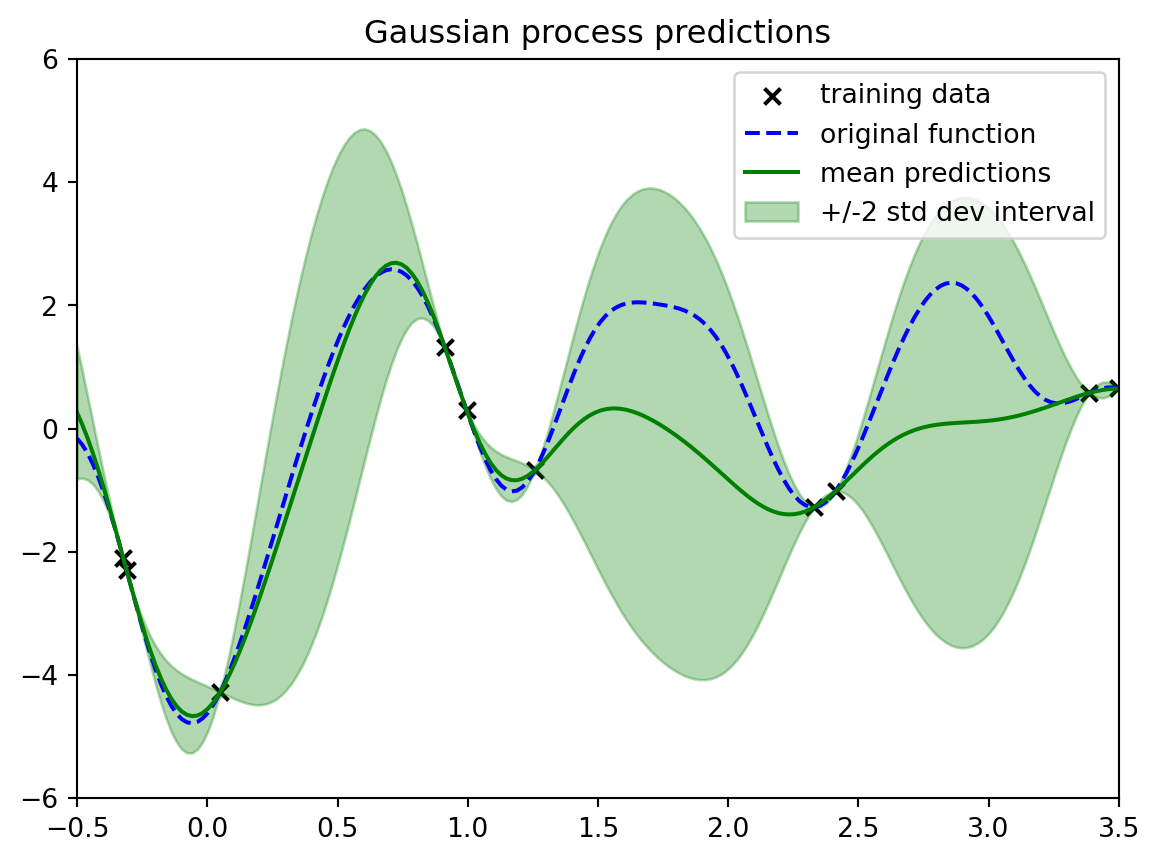
#| fig-cap: "GP scaled by the algorithm"
signal_stddev_init = 1.0;
kern_fit = signal_stddev_init**2*RBF(
length_scale=1.0,length_scale_bounds=(0.01, 100))
gpfit = GaussianProcessRegressor(
kernel=kern_fit,n_restarts_optimizer=10) # <1>
gpfit.fit(xobs.reshape(-1,1),yobs.reshape(-1,1));
print("Original kernel: " + str(kern));
print("Fit kernel: " + str(gpfit.kernel_))
mean_pred, stddev_pred = gpfit.predict(
xcurve.reshape(-1,1), return_std=True)
plt.scatter(
xobs,yobs,color="black",
marker="x", label="training data")
plt.plot(
xcurve,ycurve,linestyle="dashed",
color="blue", label="original function")
plt.plot(
xcurve,mean_pred,color="green",
label="mean predictions")
plt.fill_between(
xcurve,mean_pred-2*stddev_pred,
mean_pred+2*stddev_pred,
color="green",alpha=0.3,
label=r"+/-2 std dev interval")
plt.legend();
plt.xlim([xstart,xstop]);
plt.ylim((-3*signal_stddev,3*signal_stddev));
plotout = plt.title("Gaussian process predictions")
```
1. now we ARE fitting the hyperparameters
## What next
- adding observation noise variance
- extrapolation
- high-dimensional inputs
Always ask: What uncertainty are we quantifying? ^[This is key as in real life there are many sources of uncertainty and in our models we only get to quantify one!]
## Observation noise
- So far we've been assuming that we observed $f(x)$ directly
- But often the actual observation $y$ has additional noise:
$$
f \sim \mathcal{GP}(m, k) \qquad y^{(n)} = f(x) + \epsilon^{(n)}, \qquad \epsilon^{(n)} \stackrel{iid}{\sim} \mathcal{N}(0, \tau^2)
$$
- we observe $\{(x^{(n)}, y^{(n)})\}_{n=1}^N$ and want to learn the latent $f$
- The $y$ are multivariate-Gaussian distributed with mean and covariance summed.
- The mean of $y^{(n)}$ is given by the function $m(x^{(n)})$. and $\mathbb{C}ov[y^{(n)},y^{(n')}]=k(x^{(n)},x^{(n')})+\tau^2\mathbb{1}_{n=n'}$
- The covariance is given by the kernel function:
$$
y \sim \mathcal{N}(f(x), \tau^2 I)
$$
Before:
$$
\begin{bmatrix}
f(X) \\
f(X')
\end{bmatrix}
\sim \mathcal{N}
\left(
\begin{bmatrix}
0_N \\
0_M
\end{bmatrix}
\begin{bmatrix}
K(X, X) & K(X, X') \\
K(X', X) & K(X', X')
\end{bmatrix}
\right)
$$
Now :
$$
\begin{bmatrix}
y^{(1:N)} \\
f(X')
\end{bmatrix}
\sim \mathcal{N}
\left(
\begin{bmatrix}
0_N \\
0_M
\end{bmatrix}
\begin{bmatrix}
K(X, X)+ \tau \mathbb{I} & K(X, X') \\
K(X', X) & K(X', X')
\end{bmatrix}
\right)
$$
## What uncertainty are we quantifying? {#sec-what-uncertainty}
- It's worth being aware that data science (ML/stats/AI) often overloads common colloquial terms with terms of art
- E.g. "significance", "bias", "generalization"
- Every precise use of "uncertainty" has this issue
- E.g. frequentist sampling, Bayesian, etc.
- We should always make sure we can distinguish what is,
and what is not, covered by the term of art
- A standard setup (our setup so far):
- We model the data as generated according to a GP with squared exponential kernel and observation noise
- We fit the hyperparameters (the signal variance, the length scale(s), and the noise variance) to single values
- The reported uncertainties are what result when the GP model and fitted hyperparameters are exactly correct
[Are there other uncertainties that aren't being quantified here?]{.column-margin}
## Some other sources of uncertainty {#sec-other-sources-of-uncertainty}
- There may be multiple sets of substantively different hyperparameter values that are both plausible and
consistent with the observed data
- What can we do? First: unit test, plot, sense check!
- Ask what is possible to learn with the data available
- Multiple random restarts: plot the results
- Bayesian model of the hyperparameters
- A GP with your mean & kernel may be meaningfully misspecified for the data
- Box: "All models are wrong, but some are useful"
- What can we do?
- First: unit test, plot, sense check!
- Can change the mean and/or kernel
- E.g. local/heteroskedastic models, periodic kernels, linear mean function, many many more.
## Extrapolation {#sec-extrapolation}
- Extrapolation: Estimation/prediction beyond the observed data
- Compare to interpolation: estimation/prediction within the observed data
- When using GPs with a squared exponential kernel:
- Data points that are more than a handful of length scales from other data points will revert to prior behavior
- Note: extrapolation isn't a special issue unique to GPs. It's a fundamentally hard problem for all data analysis methods
- To extrapolate, you need to make assumptions
- When you have domain knowledge of a system, you might be able to use it to extrapolate
- When you're letting a machine learning method use its defaults, it's making assumptions. Do you know what those assumptions are?
## More than one input
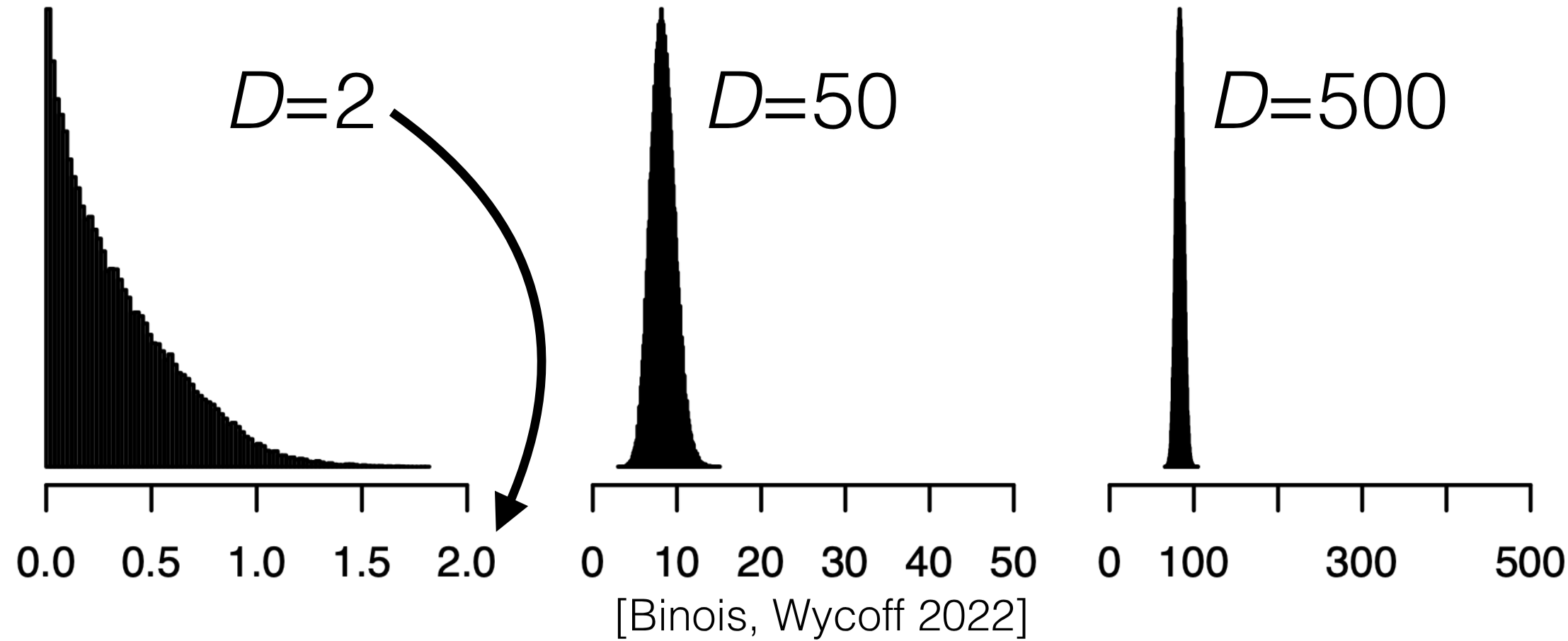{#fig-multiple-inputs .column-margin group="slides" width="53mm"}
- Our illustrations have almost all been for one input so far
- But in real life, it's typical to have more than one input
- What could go wrong? Previous lessons apply, but also:
- Possibly different length scales. Check defaults.
- Regression in high dimensions is a fundamentally hard problem (without additional assumptions)
- All points are "far away" in high dimensions. Illustration:
- Uniformly randomly sample 10,000 points on $[0,1]^D$
- Make a histogram of squared inter-point distances
- Recall: points "far" from data default to the prior mean and variance.
## Some high points of what got cut for time {#sec-high-points}
- We ran out of time! Here are some high-level summary points beyond what we discussed together:
- There are other challenges with many inputs, both conceptual and practical
- Running time for GP regression can be an issue with a large number of training data points
- In particular, the matrix inverse can be expensive
- There are incredibly many papers about fast approximations to the exact Gaussian process
- Each approximation has pros and cons
- Bayesian optimization inherits many of the pros and cons of Gaussian processes for regression
- Exercise: once you learn about Bayesian optimization, think about how the pros and cons we discussed together might translate there