144.1 Is the KF invincible?
- So far, the examples of the KF have been very positive!
- But, it turns out that there are ways to make a KF fail.
- The derivation of the KF makes several assumptions. If those assumptions are not met, the KF will not perform as expected.
- The first of these that we illustrate in this lesson is the case where our model of the system does not exactly agree with the true system dynamics.
- We keep the same simulation dataset, but force the KF to use different A_d, B_d, and C_d matrices from the true system (D_d = 0).
load simOut.mat Ad Bd Cd Dd SigmaV SigmaW dT t u x z
% Force the KF to use different Ad, Bd, Cd, Dd from the model simulation:
Ad = 0.99*Ad;
Bd = 0.99*Bd;
Cd = 0.99*Cd;
Dd = 0.99*Dd;144.2 KF results when using incorrect dynamic model
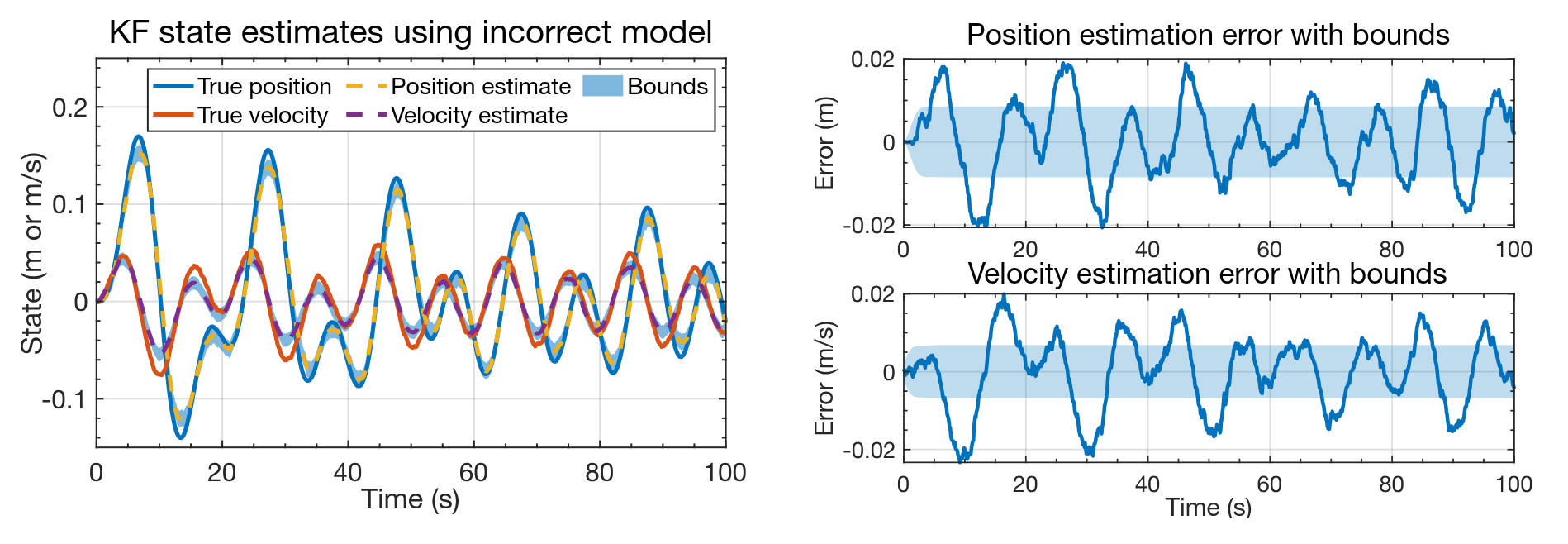
- The plots show KF output for this scenario.
- Even though the model used by the KF is very close to the true model, the state estimates have degraded and the confidence bounds are no longer reliable.
Plots shown in the handout:
- KF state estimates using incorrect model
- Position estimation error with bounds
- Velocity estimation error with bounds
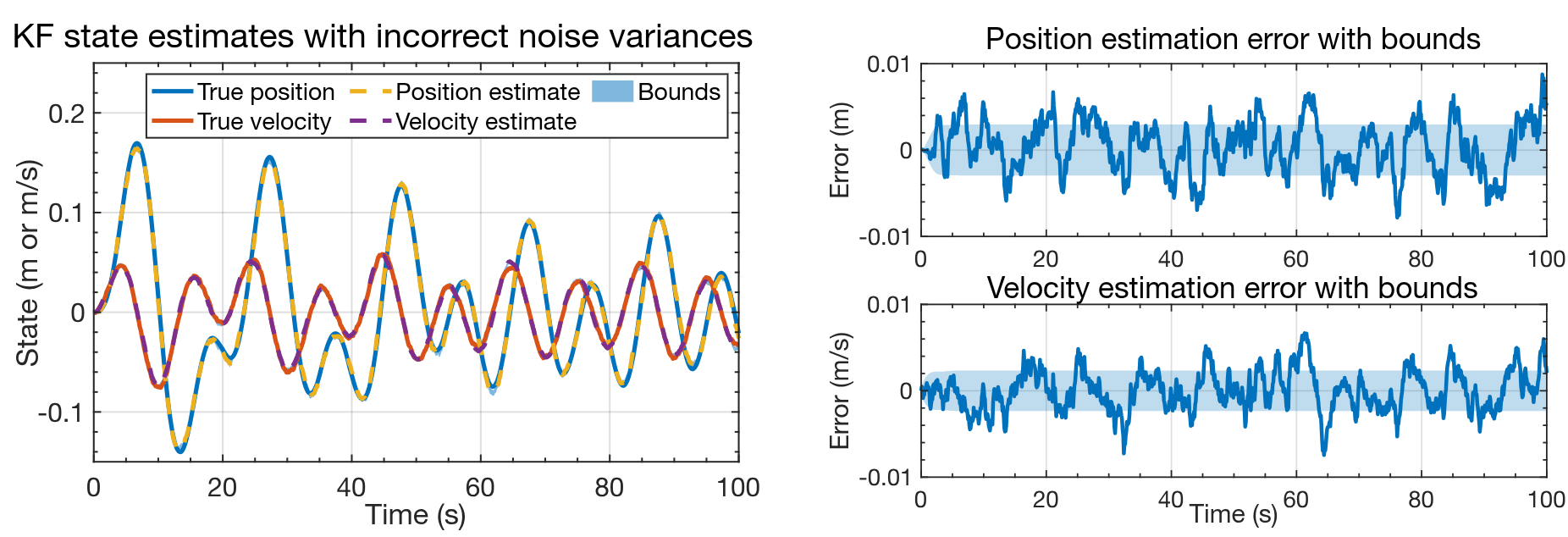
144.3 KF results when using incorrect noise variances
- What if we know the system model exactly, but have poor information regarding the noise covariances?
% Force the KF to use different SigmaW and SigmaV from the model simulation:
SigmaW = 0.1*SigmaW;
SigmaV = 0.1*SigmaV;Plots shown in the handout:
- KF state estimates with incorrect noise variances
- Position estimation error with bounds
- Velocity estimation error with bounds
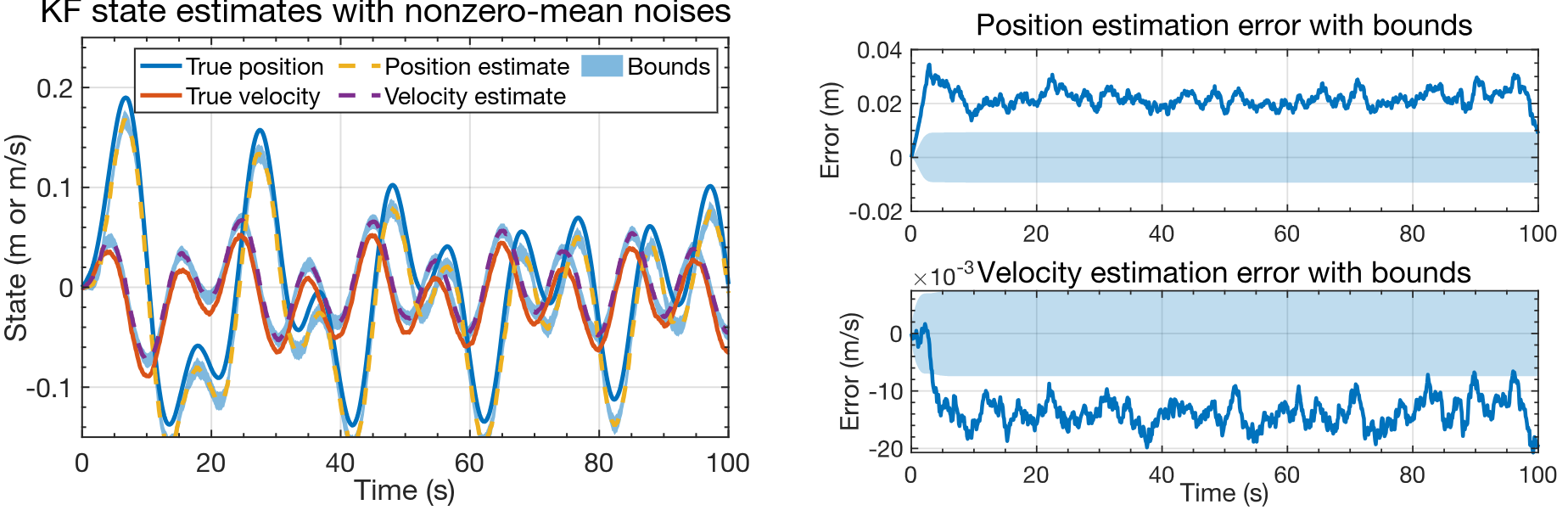
144.4 Nonzero-mean process and sensor noises
- The KF derivation assumes that \mathbb{E}[w_k] = 0 and \mathbb{E}[v_k] = 0.
- I created a new spring-mass-damper dataset where w_k and v_k had the same covariances as before, but
\mathbb{E}[w_k] = \begin{bmatrix} 0.001 \\ -0.0001 \end{bmatrix}
and
\mathbb{E}[v_k] = -0.025.
- I then executed the KF on this new dataset.
Plots shown in the handout:
- KF state estimates with nonzero-mean noises
- Position estimation error with bounds
- Velocity estimation error with bounds
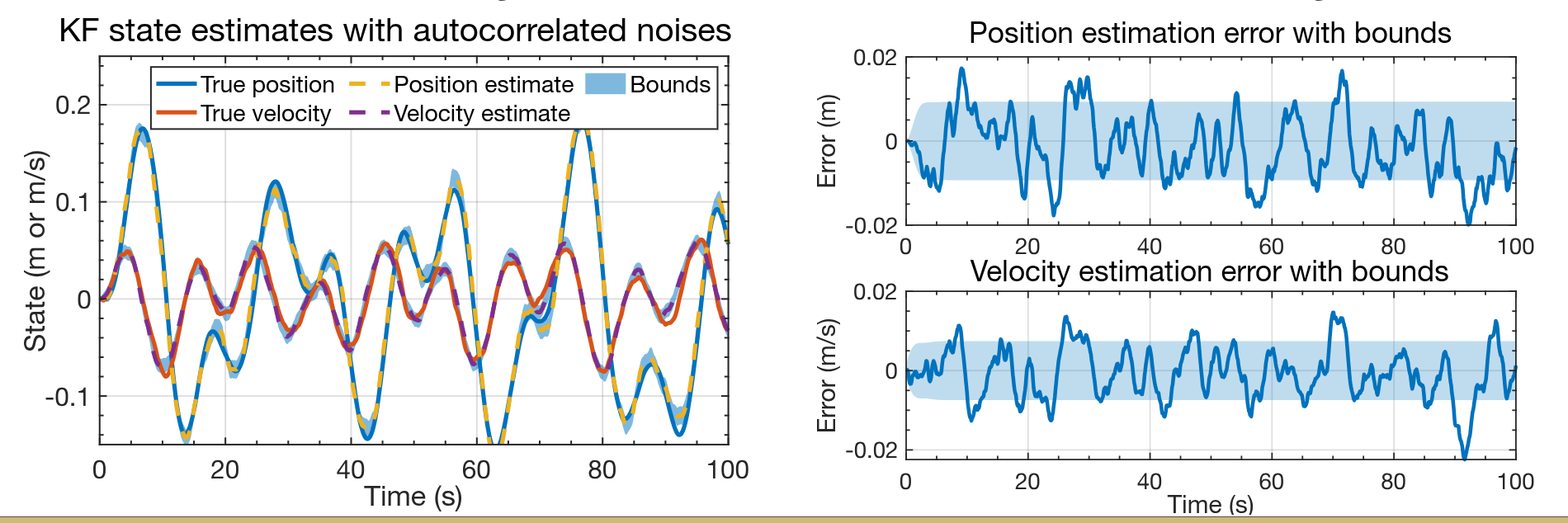
144.5 Autocorrelated process and sensor noises
- The KF derivation assumes that w_k and v_k are white.
- I created a new spring-mass-damper dataset where w_k and v_k are self-correlated (filtered).
- I then executed the KF on this new dataset.
- State estimates have degraded and the confidence bounds are no longer reliable.
Plots shown in the handout:
- KF state estimates with autocorrelated noises
- Position estimation error with bounds
- Velocity estimation error with bounds
144.6 Summary
- In this lesson you learned that the KF is not invincible.
- Some conditions cause KF to produce unreliable estimates.
- Bad model: If the model of the system’s dynamics is incorrect, or if the model of the noise covariances is incorrect, the KF can fail.
- This is especially true if the system dynamics are nonlinear; see Course 3.
- Biased noises: If the process and/or sensor noises are not zero mean, KF can fail.
- But, we can estimate the biases; see Course 2.
- Correlated noises: If the process and/or sensor noises are not white, KF can fail.
- But, we can model the correlations; see Course 2.
- Non-Gaussian noise: If the noises are not Gaussian (especially for nonlinear systems), the KF can fail; see Course 4.
- Also, there can be numeric instabilities (cf. Course 2); and performance degradation if measurements of u_k and z_k are not synchronized (cf. Course 2).