142.1 Introduction to lesson
- In this lesson, you will learn how to implement KF in Octave.
- It is recommended that you keep the KF equations nearby.
TipPrediction
Step 1a: State prediction (time update)
\hat{x}_k^- = A_{k-1}\hat{x}_{k-1}^+ + B_{k-1}u_{k-1}
Step 1b: Prediction-error covariance update
\Sigma_{\tilde{x},k}^- = A_{k-1}\Sigma_{x,k-1}^+ A_{k-1}^T + \Sigma_{\tilde{w}}
Step 1c: Predict system output
\hat{z}_k = C_k \hat{x}_k^- + D_k u_k
TipCorrection
Step 2a: Estimator gain matrix
L_k = \Sigma_{\tilde{x},k}^- C_k^T \left[C_k \Sigma_{\tilde{x},k}^- C_k^T + \Sigma_{\tilde{v}}\right]^{-1}
Step 2b: State estimate (measurement update)
\hat{x}_k^+ = \hat{x}_k^- + L_k (z_k - \hat{z}_k)
Step 2c: Estimation-error covariance update
\Sigma_{\tilde{x},k}^+ = (I - L_k C_k)\Sigma_{\tilde{x},k}^-
142.2 Visualizing the Linear Kalman Filter
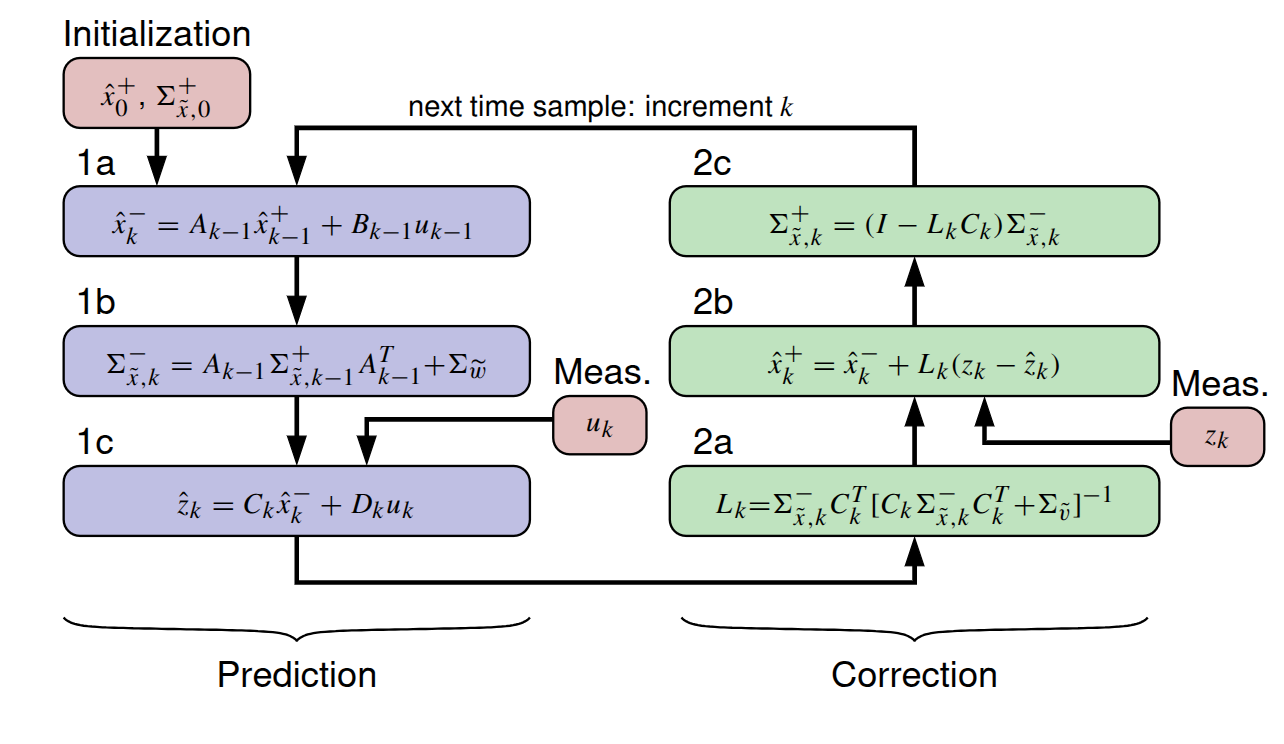
- Linear Kalman-filter equations naturally form a recursion:
- Initialization → Prediction → Correction → Next timestep
- Notes:
- “Simple” to implement on a digital computer
- Only six lines of code execute each iteration
- Most effort is in setup and plotting
- “Simple” to implement on a digital computer
142.3 KF Step 1 (Prediction)
% Load data from simulation of system dynamic model
load simOut.mat Ad Bd Cd Dd SigmaV SigmaW dT t u x z
% Determine number of states and timesteps
[nx,nt] = size(x);
% Initialize state estimate and covariance
xhat = zeros(nx,1);
SigmaX = zeros(nx,nx);
% Initialize storage for state/bounds for plotting purposes
xhatstore = zeros(nx,nt);
boundstore = zeros(nx,nt);
for k = 2:length(t)
% KF Step 1a: State prediction time update
xhat = Ad*xhat + Bd*u(:,k-1); % use prior value of "u"
% KF Step 1b: Prediction-error covariance time update
SigmaX = Ad*SigmaX*Ad' + SigmaW;
% KF Step 1c: Predict system output
zhat = Cd*xhat + Dd*u(:,k); % use present value of "u"142.4 KF Step 2 (Correction)
% KF Step 2a: Compute estimator matrix
L = SigmaX*Cd'/(Cd*SigmaX*Cd' + SigmaV);
% KF Step 2b: State estimate measurement update
xhat = xhat + L*(z(:,k) - zhat);
% KF Step 2c: Estimation-error covariance measurement update
SigmaX = (eye(nx) - L*Cd)*SigmaX;
% Store estimate and bounds for evaluation / plotting purposes
xhatstore(:,k) = xhat;
boundstore(:,k) = 3*sqrt(diag(SigmaX));
end- That’s it! We’re now ready to plot results.
142.5 Plot Results from KF Execution
figure(1); clf; % Plot the states and estimates
t2 = [t fliplr(t)]; % Prepare for plotting bounds via "fill"
x2 = [xhatstore - boundstore fliplr(xhatstore + boundstore)];
h1 = fill(t2,x2,'b','FaceAlpha',0.5,'LineStyle','none');
hold on; grid on
h2 = plot(t,x',t,xhatstore','--'); % Plot true state and estimate
legend([h2;h1], ...
'True position','True velocity','Position estimate', ...
'Velocity estimate','Bounds');
title('Demonstration of Kalman filter state estimates');
xlabel('Time (s)');
ylabel('State (m or m/s)');
figure(2); clf;
xerr = x - xhatstore; % Plot state-estimation errors
for k = 1:nx
subplot(nx,1,k);
fill(t2,[-boundstore(k,:) fliplr(boundstore(k,:))],'b', ...
'FaceAlpha',0.25,'LineStyle','none');
hold on; grid on;
plot(t,xerr(k,:),'b');
title(sprintf('State %d estimation error with bounds',k));
xlabel('Time (s)');
ylabel('Error');
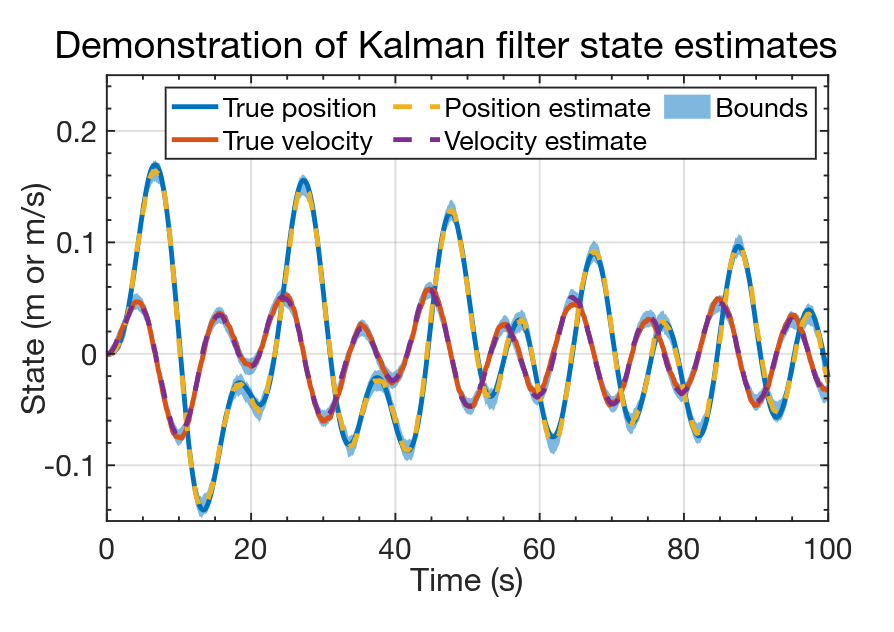
end142.6 Sample Results: States and Estimates
- Output shown for spring-mass-damper example using simulation data.
- True states and estimated states are plotted with confidence bounds.
Key observations:
- KF estimates both position and velocity well
- Errors do not converge to zero
- Estimates remain within confidence bounds (as expected)
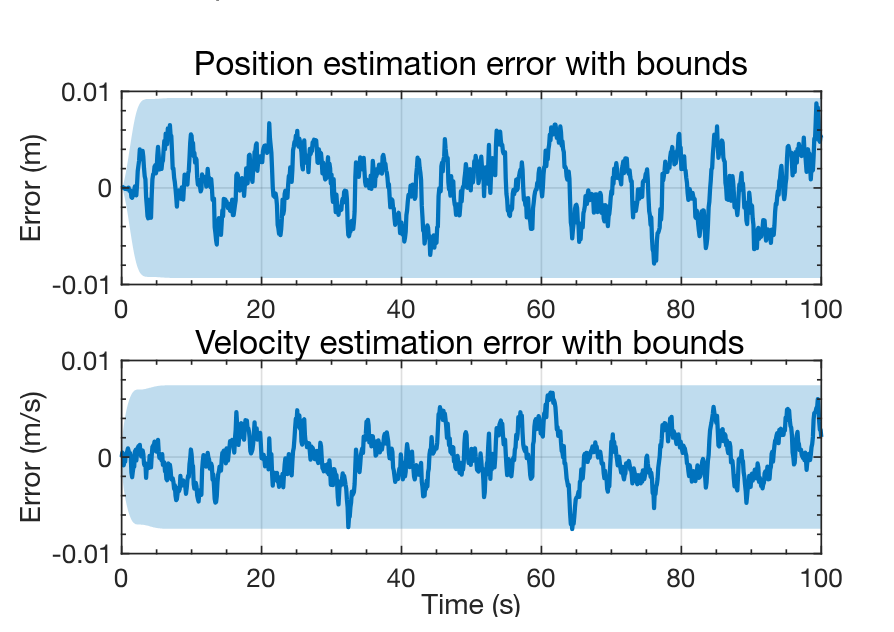
142.7 Sample Results: Estimation Errors
- Alternative visualization: plot estimation errors directly
Insights:
- Errors always contain a random component (due to process noise (w_k))
- Easier to verify confidence bounds
Observations:
- Position estimate remains within bounds
- Velocity estimate exceeds bounds once (≈ 0.1% of time)
- Matches theoretical expectation (~99.7% confidence bounds)
142.8 Summary
You have learned how to:
- Implement KF steps in Octave code
- Plot KF output in two ways
Notes:
- Code is general (not system-specific)
- Applies to any linear system satisfying KF assumptions
- Results provide intuition for KF behavior