137.1 Setting up the assumptions
For continuous-time systems we have:
\dot{x}(t) = A x(t) + B_u u(t) + B_w w(t)
where A, B_u and B_w are assumed to be known and constant1 and:
- x(t): State vector, a random process.
- u(t): Deterministic control inputs.
- w(t): Noise driving the process (process noise), a random process.
Further: \begin{aligned} \mathbb{E}[x(0)] &= \bar{x}(0)& \mathbb{E}\left[(x(0)-\bar{x}(0))(x(0)-\bar{x}(0))^T\right] &= \Sigma_{\tilde{x}}(0)\\ \mathbb{E}[w(t)] &= 0 &\mathbb{E}\left[w(t)w(\tau)^T\right] &= S_w\,\delta(t-\tau). \end{aligned}
S_w is the spectral density of w(t).
137.2 Propagation of the mean
- Easiest analysis is to discretize model; then, use results obtained earlier for discrete-time systems letting \Delta t \to 0.
- We drop deterministic inputs u(t) from the model for simplicity. 2
- Starting with the discrete case, we have:
\begin{aligned} \bar{x}_k &= A_d \bar{x}_{k-1} + B_d u_{k-1} \\ A_d &= e^{A\Delta t} \approx I + A\Delta t + \mathcal{O}(\Delta t^2). \end{aligned}
- Let \Delta t \to 0 and consider case when u_k = 0 for all k.
\begin{aligned} \bar{x}_k &= (A\Delta t + I)\bar{x}_{k-1} \\ \frac{\bar{x}_k - \bar{x}_{k-1}}{\Delta t} &= A\bar{x}_{k-1}. \end{aligned}
- As \Delta t \to 0 \qquad \dot{\bar{x}}(t) = A\bar{x}(t) as we might expect.
137.3 Summarizing propagation of the mean
- We add back in the influence of u(t), skipping the full derivation here for simplicity.
Overall, the mean propagation for continuous-time dynamic systems having random inputs is:
\begin{aligned} \bar{x}(0)& \;\text{: Given} \\ \dot{\bar{x}}(t) &= A\bar{x}(t) + B_u u(t). \end{aligned}
Simulation of a deterministic system and simulation of the mean value of the state for a stochastic system are treated the same way.
137.4 Variations about the mean
- The result for discrete-time systems was:
\Sigma_{\tilde{x},k} = A_d \Sigma_{\tilde{x},k-1} A_d^T + \Sigma_{\tilde{w}}.
- But, we need a way to relate discrete \Sigma_{\tilde{w}} to a continuous spectral density S_w before we can proceed.
- Recall the discrete system response in terms of continuous system matrices:
\begin{aligned} x_k &= e^{A\Delta t}x_{k-1} + \int_{(k-1)\Delta t}^{k\Delta t} e^{A(k\Delta t-\tau)} B_w w(\tau)\,d\tau \\ &= e^{A\Delta t}x_{k-1} + w_{k-1}. \end{aligned}
- The integral explicitly accounts for variations in the noise during \Delta t. We have:
w_{k-1} = \int_{(k-1)\Delta t}^{k\Delta t} e^{A(k\Delta t-\tau)} B_w w(\tau)\,d\tau.
137.5 Evaluating \Sigma_{\tilde{w}}
Recall, w_k is discrete white noise having covariance:
\mathbb{E}[w_k w_l^T] = \begin{cases} \Sigma_{\tilde{w}}, & k=l \\ 0, & k\neq l \end{cases}
Form outer product using w_{k-1} from prior slide to get equivalent \Sigma_{\tilde{w}}:
\begin{aligned} \Sigma_{\tilde{w}} &= \mathbb{E}\left[\left(\int_{(k-1)\Delta t}^{k\Delta t} e^{A(k\Delta t-\tau)}B_w w(\tau)\,d\tau\right) \left(\int_{(k-1)\Delta t}^{k\Delta t} e^{A(k\Delta t-\gamma)}B_w w(\gamma)\,d\gamma\right)^T\right] \\ &= \mathbb{E}\left[\int_{(k-1)\Delta t}^{k\Delta t}\int_{(k-1)\Delta t}^{k\Delta t} e^{A(k\Delta t-\tau)}B_w w(\tau)w(\gamma)^T B_w^T e^{A^T(k\Delta t-\gamma)}\,d\tau\,d\gamma\right] \end{aligned}
- Big ugly mess but has two saving graces:
- Expectation can go inside integrals.
- \mathbb{E}[w(\tau)w(\gamma)^T] = S_w\,\delta(\tau-\gamma) \implies one of the integrals drops out.
137.6 The solution for \Sigma_{\tilde{w}}
- So, we have:
\Sigma_{\tilde{w}} = \int_{(k-1)\Delta t}^{k\Delta t} e^{A(k\Delta t-\tau)} B_w S_w B_w^T e^{A^T(k\Delta t-\tau)}\,d\tau.
While S_w may have a simple form, \Sigma_{\tilde{w}} will be a full matrix in general.
One approach to solving the integral is to approximate.
As \Delta t \to 0, then k\Delta t - \tau \to 0 and e^{A(k\Delta t-\tau)} \approx I + A(k\Delta t-\tau) + \cdots
That is, e^{A(k\Delta t-\tau)} \approx I. Then,
\Sigma_{\tilde{w}} \approx (B_w S_w B_w^T)\,\Delta t.
We will see a better method to evaluate \Sigma_{\tilde{w}} when \Delta t \neq 0, but for now we continue with this result to determine the continuous-time system covariance propagation.
137.7 The solution for \Sigma_{\tilde{x},k}
We now substitute \Sigma_{\tilde{w}} \approx B_w S_w B_w^T\Delta t and A_d \approx (I + A\Delta t) into the covariance-propagation equation:
\begin{aligned} \Sigma_{\tilde{x},k} &= A_d \Sigma_{\tilde{x},k-1} A_d^T + \Sigma_{\tilde{w}} \\ & \approx (I + A\Delta t)\Sigma_{\tilde{x},k-1}(I + A\Delta t)^T + B_w S_w B_w^T\Delta t \\ &= \Sigma_{\tilde{x},k-1} + \Delta t\left(A\Sigma_{\tilde{x},k-1} + \Sigma_{\tilde{x},k-1}A^T + B_w S_w B_w^T\right) + \mathcal{O}(\Delta t^2) \\ \frac{\Sigma_{\tilde{x},k} - \Sigma_{\tilde{x},k-1}}{\Delta t} &= A\Sigma_{\tilde{x},k-1} + \Sigma_{\tilde{x},k-1}A^T + B_w S_w B_w^T + \mathcal{O}(\Delta t). \end{aligned}
As \Delta t \to 0, \dot{\Sigma}_{\tilde{x}}(t) = A\Sigma_{\tilde{x}}(t) + \Sigma_{\tilde{x}}(t)A^T + B_w S_w B_w^T, initialized with \Sigma_{\tilde{x}}(0).
137.8 Interpreting the solution for \Sigma_{\tilde{x},k}
Covariance: \dot{\Sigma}_{\tilde{x}}(t) = A\Sigma_{\tilde{x}}(t) + \Sigma_{\tilde{x}}(t)A^T + B_w S_w B_w^T
This is a matrix differential equation.
Symmetric, so we don’t need to solve for every element3. Two effects:
- A \Sigma_{\tilde{x}}(t) + \Sigma_{\tilde{x}}(t)A^T
- Homogeneous part.
- Contractive for stable A.
- Reduces covariance.
- B_w S_w B_w^T
- Impact of process noise.
- Tends to increase covariance.
- A \Sigma_{\tilde{x}}(t) + \Sigma_{\tilde{x}}(t)A^T
Steady-state solution: Effects balance for systems having constant matrices A, B_w, S_w and stable A. A\Sigma_{\tilde{x},ss} + \Sigma_{\tilde{x},ss}A^T + B_w S_w B_w^T = 0.
This is a continuous-time Lyapunov equation. In Octave,
lyap.m.
137.9 Summarizing propagation of the covariance
- So, after a short derivation, we now have the solution for how the uncertainty of the state is propagated over time.
The covariance propagation is:
\begin{aligned} \Sigma_{\tilde{x}}(0)&\;\text{: Given} \\ \dot{\Sigma}_{\tilde{x}}(t) &= \underbrace{A\Sigma_{\tilde{x}}(t) + \Sigma_{\tilde{x}}(t)A^T}_{\text{homogeneous term}} + \underbrace{B_w S_w B_w^T}_{\text{driving term}}. \end{aligned}
137.10 An example, solving for steady-state
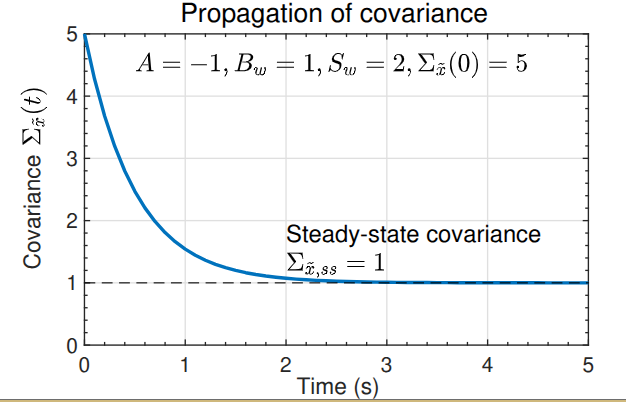
- \dot{x}(t) = Ax(t) + B_w w(t), where A and B_w are scalars.
- Then, \dot{\Sigma}_{\tilde{x}} = 2A\Sigma_{\tilde{x}} + B_w^2 S_w the solution to this ODE is: \Sigma_{\tilde{x}}(t) = \frac{B_w^2 S_w}{2A}\left(e^{2At} - 1\right) + \Sigma_{\tilde{x}}(0)e^{2At}.
- If A < 0 (stable) then the initial condition contribution goes to zero and: \Sigma_{\tilde{x},ss} = -\frac{B_w^2 S_w}{2A}.
- Increased \Sigma_{\tilde{x},ss} as more noise added via the B_w^2 S_w term; decreased \Sigma_{\tilde{x},ss} as A becomes “more stable”.
- Example shown to the right.
137.11 Summary
- With deterministic state-space systems, we can simulate a model and have no uncertainty regarding the state trajectory.
- With stochastic state-space systems, we instead track the mean and covariance of the RV representing the state at every point in time.
- We learned how to update the mean and covariance: \begin{aligned} \dot{\bar{x}}(t) &= A\bar{x}(t) + B_u u(t) \\ \dot{\Sigma}_{\tilde{x}}(t) &= A\Sigma_{\tilde{x}}(t) + \Sigma_{\tilde{x}}(t)A^T + B_w S_w B_w^T. \end{aligned}
- The true state x(t) is expected to be within \bar{x}(t) \pm 3\sqrt{\operatorname{diag}(\Sigma_{\tilde{x}}(t))} approximately 99.7\% of the time if the model is correct and noises are Gaussian.