---
title: "Lesson 1.2.6: How do I simulate a discrete-time state-space model?"
subtitle: "Kalman Filter Boot Camp (and State Estimation)"
description: "This lesson explains how to simulate discrete-time state-space models."
categories:
- "Probability and Statistics"
keywords:
- "Kalman Filter"
- "state estimation"
- "linear algebra"
- "discrete-time systems"
- "simulation"
engine: knitr
---
```r
#| label: setup-octave
#| include: false
knitr::knit_engines$set(octave = function(options) {
code <- paste(options$code, collapse = "\n")
cmd <- Sys.which("octave-cli")
if (cmd == "") cmd <- Sys.which("octave")
if (cmd == "") stop("Octave not found on PATH (octave-cli/octave).")
# write chunk to a temp .m file (avoids --eval quoting issues entirely)
f <- tempfile(fileext = ".m")
on.exit(unlink(f), add = TRUE)
# fail-fast + useful error message
wrapped <- paste0(
"try\n",
code, "\n",
"catch err\n",
" disp(err.message);\n",
" exit(1);\n",
"end\n"
)
writeLines(wrapped, f)
args <- c("--quiet", "--no-gui", "--no-window-system", f)
out <- system2(cmd, args = args, stdout = TRUE, stderr = TRUE)
status <- attr(out, "status")
if (!is.null(status) && status != 0) stop(paste(out, collapse = "\n"))
knitr::engine_output(options, code, paste(out, collapse = "\n"))
})
```
```r
#| label: setup
#| include: false
knitr::knit_engines$set(octave = function(options) {
code <- paste(options$code, collapse = "\n")
# wrap code so multi-line works reliably under --eval
# (also prevents accidental early termination)
wrapped <- paste0("try; ", code, "; catch err; disp(getfield(err,'message')); exit(1); end;")
cmd <- Sys.which("octave-cli")
if (cmd == "") cmd <- Sys.which("octave") # fallback
if (cmd == "") stop("Octave not found on PATH (octave-cli/octave).")
args <- c("--quiet", "--no-gui", "--eval", wrapped)
out <- system2(cmd, args = args, stdout = TRUE, stderr = TRUE)
# If Octave errored, surface it as a knitr error
status <- attr(out, "status")
if (!is.null(status) && status != 0) {
stop(paste(out, collapse = "\n"))
}
# Return output as verbatim text (knitr will render it nicely)
knitr::engine_output(options, code, paste(out, collapse = "\n"))
})
```
## How do I simulate a discrete-time state-space model? {#sec-kf-1.2.6-simulating-discrete-time-models}
### Simulating discrete-time systems
- When simulating discrete-time state-space models, we have (at least) two options.
- There is a direct approach where we write the simulation code ourselves;
- Also, Octave has two functions in its `control` package that help us simulate these
models easily.
- As with continuous-time models, the first of these is `ss`, which creates a state-space object from $A$, $B$, $C$, and $D$ matrices.
- The second is `lsim`, which simulates a state-space object for given input
conditions and an optional initial state.
- This lesson will show examples of both approaches, applied to the *NCP*, *NCV*, and *CT* models that were introduced for continuous-time simulations in Lesson 1.2.2.
- But first, we need to convert these continuous-time state-space models to
equivalent discrete-time models.
### Converting the nearly-constant-position model
- We might be interested to simulate a discrete-time version of the continuous-time nearly-constant-position model.
- Recall that in continuous time, the 2-d NCP model is^[We are treating random input $w(t)$ in the same way we have discussed treating deterministic input $u(t)$ here. As you will learn next week, this assumption is somewhat incorrect, but is "okay for now."] :
$$
\begin{aligned}
\dot x(t) &= 0_{2 \times 2} x(t) + I_2 w(t) \\
z(t) &= x(t) + v(t)
\end{aligned}
$$
In discrete time, we must then have (where ĩt is the sample period):
$$
\begin{aligned}
x_{k+1} &= e^{0\Delta t} x_k + \left( \int_0^{\Delta t} e^{0\sigma} d\sigma \right) I w_k \\
z_{k} &= x_k + v_k
\end{aligned}
$$
### Scaled discrete-time NCP model
- To compute $A_d$ , note that $e^{0\Delta t} = I$, which is perhaps most
easily confirmed using the infinite-series expansion for $e^{At}$ .
- To compute $B_d$ , note that we cannot use the simplified method $B_d = A^{-1}(A_d - I)B$ since $A$ is not invertible.
- Instead, we use the longer-form integration method, where $\int_0^{\Delta t} Id\sigma= I \Delta t$.
- Therefore, we arrive at the discrete-time form of the NCP model:
$$
\begin{aligned}
x_{k+1}&= x_k + \Delta t w_k \\
z_k &= x_k + v_k
\end{aligned}
$$ {#eq-i86r4o}
- Note, $w_k$ is often scaled vis-à-vis $w(t)$ so that another commonly seen form is:
$$
\begin{aligned}
x_{k+1} &= x_k + \Delta t w_k \\
z_k &= x_k + v_k
\end{aligned}
$$ {#eq-er3pik}
### NCP Time (dynamic) response using toolbox
::: {#fig-l126-1 .column-margin group="slides" width="53mm"}
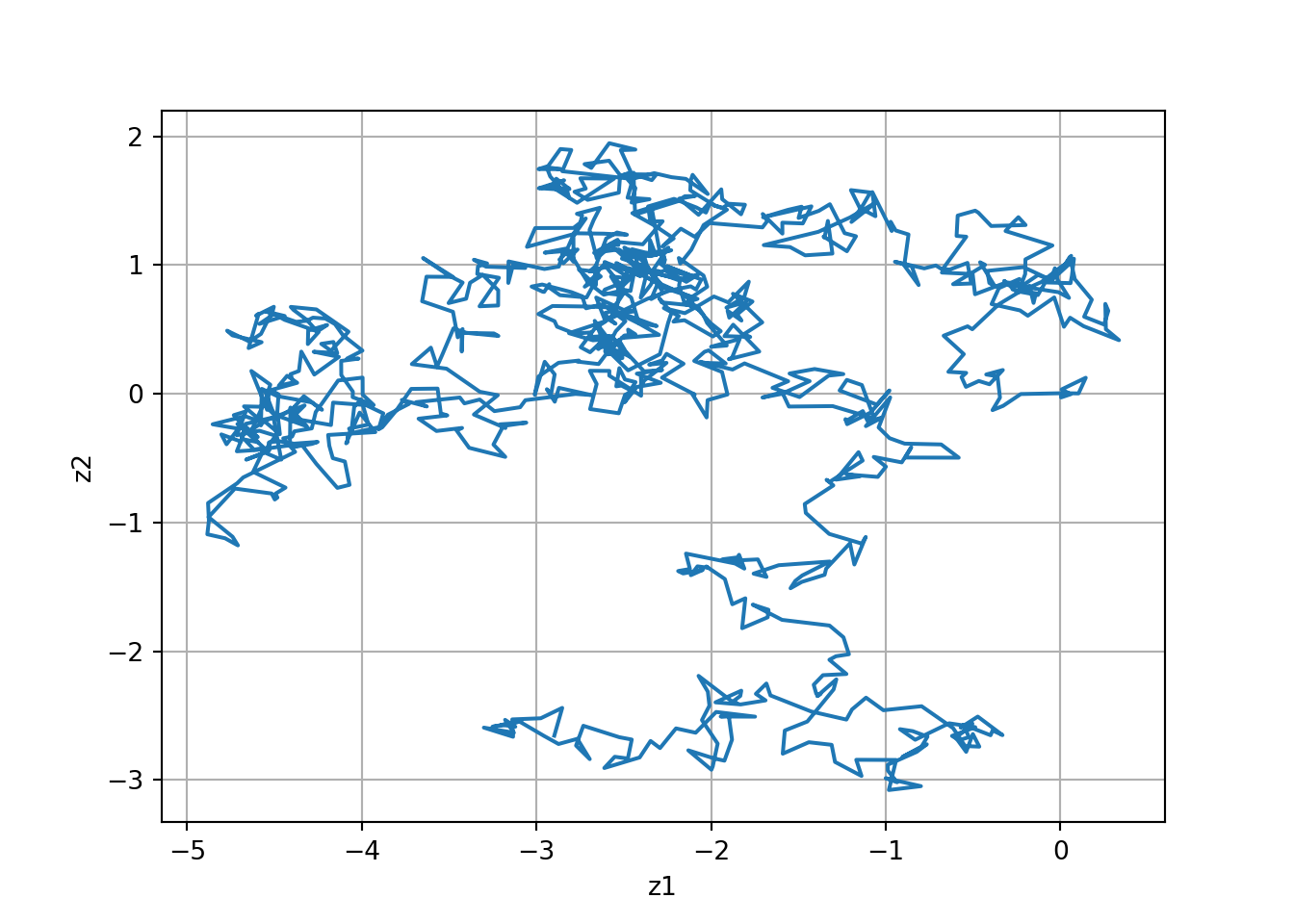
Discrete-time NCP model simulated using the toolbox methods.
:::
- First let us consider simulating an NCP model using `lsim`.
- The figure on the right is the output from simulating the Octave code below, which uses the toolbox methods.
::: {.panel-tabset}
#### Octave🎶
```octave
#| label: fig-NCP-dynamic-response-lsim-oct
#| fig-cap: "Discrete-time NCP model simulated using the toolbox methods"
pkg load control;
graphics_toolkit("gnuplot");
set(0, "defaultfigurevisible", "off"); % headless-safe
A = eye(2);
Bw = eye(2);
C = eye(2);
D = zeros(2);
maxT = 1000;
randn("seed", 123);
w = 0.1 * randn(maxT, 2); % (T x nu)
v = 0.01 * randn(maxT, 2); % (T x ny)
Ts = 1; % <-- important
ncp = ss(A, Bw, C, D, Ts); % discrete-time
z = lsim(ncp, w) + v;
plot(z(:,1), z(:,2));
xlabel("z1"); ylabel("z2");
print("-dpng", "images/fig-NCP-dynamic-response-lsim-oct.png");
```

#### Python🐍 {.active}
```{python}
#| label: fig-NCP-dynamic-response-lsim-py
#| fig-cap: "Discrete-time NCP model simulated using the toolbox methods."
import numpy as np
import matplotlib.pyplot as plt
from scipy.signal import StateSpace, dlsim
# Reproducibility (optional)
rng = np.random.default_rng(0)
A = np.eye(2)
Bw = np.eye(2)
C = np.eye(2)
D = np.zeros((2, 2))
maxT = 1000
dt = 1.0 # sample time (discrete steps)
# time x inputs, time x outputs
w = 0.1 * rng.standard_normal((maxT, 2))
v = 0.01 * rng.standard_normal((maxT, 2))
# Discrete-time state-space system
sys = StateSpace(A, Bw, C, D, dt=dt)
# dlsim returns (t, y, x) for discrete systems
t = np.arange(maxT) * dt
tout, y, x = dlsim(sys, w, t=t)
z = y + v # noisy observations
plt.figure()
plt.plot(z[:, 0], z[:, 1])
plt.grid(True)
plt.xlabel("z1")
plt.ylabel("z2")
plt.show()
```
:::
- Trajectory starts at (0,0) and moves randomly from there as w pushes object.
### Time (dynamic) response using direct method
- In discrete-time we can implement the model without `lsim`
- We use a “for” loop to implement the state-equation recursion directly.
::: {.panel-tabset}
#### Octave 🎶
```octave
#| label: fig-l126-NCP-Direct-oct
#| fig-cap: "Discrete-time NCP model simulated using the direct method"
A = eye(2);
Bw = eye(2);
C = eye(2);
D = zeros(2);
maxT = 1000;
randn("seed", 123); % normal RNG
w = 0.1 * randn(2, maxT); % <-- time x inputs (1000 x 2)
v = 0.01 * randn(2, maxT); % <-- time x outputs (1000 x 2)
x = zeros (2 , maxT ) ; % storage for x
x (: ,1) =[0;0]; % initial posn .
for k =2: maxT % simulate model
x(: , k ) = A * x(: ,k -1) + w(: ,k -1) ;
end
z = C * x + v ;
plot ( z (1 ,:) ,z (2 ,:) ) ;
```
#### Python 🐍 {.active}
```{python}
#| label: fig-l126-NCP-Direct-py
#| fig-cap: "Discrete-time NCP model simulated using the direct method."
import numpy as np
import matplotlib.pyplot as plt
A = np.eye(2)
Bw = np.eye(2) # unused in the direct method (kept for parity)
C = np.eye(2)
D = np.zeros((2, 2)) # unused in the direct method
maxT = 1000
# Octave: randn("seed", 123)
rs = np.random.RandomState(123) # closer to Octave's legacy RNG style
w = 0.1 * rs.randn(2, maxT) # (2, maxT)
v = 0.01 * rs.randn(2, maxT) # (2, maxT)
x = np.zeros((2, maxT))
x[:, 0] = np.array([0.0, 0.0])
# Octave: for k = 2:maxT => Python indices 1..maxT-1
for k in range(1, maxT):
x[:, k] = A @ x[:, k-1] + w[:, k-1]
z = C @ x + v # (2, maxT)
plt.figure()
plt.plot(z[0, :], z[1, :])
plt.grid(True)
plt.xlabel("z1")
plt.ylabel("z2")
plt.show()
```
:::
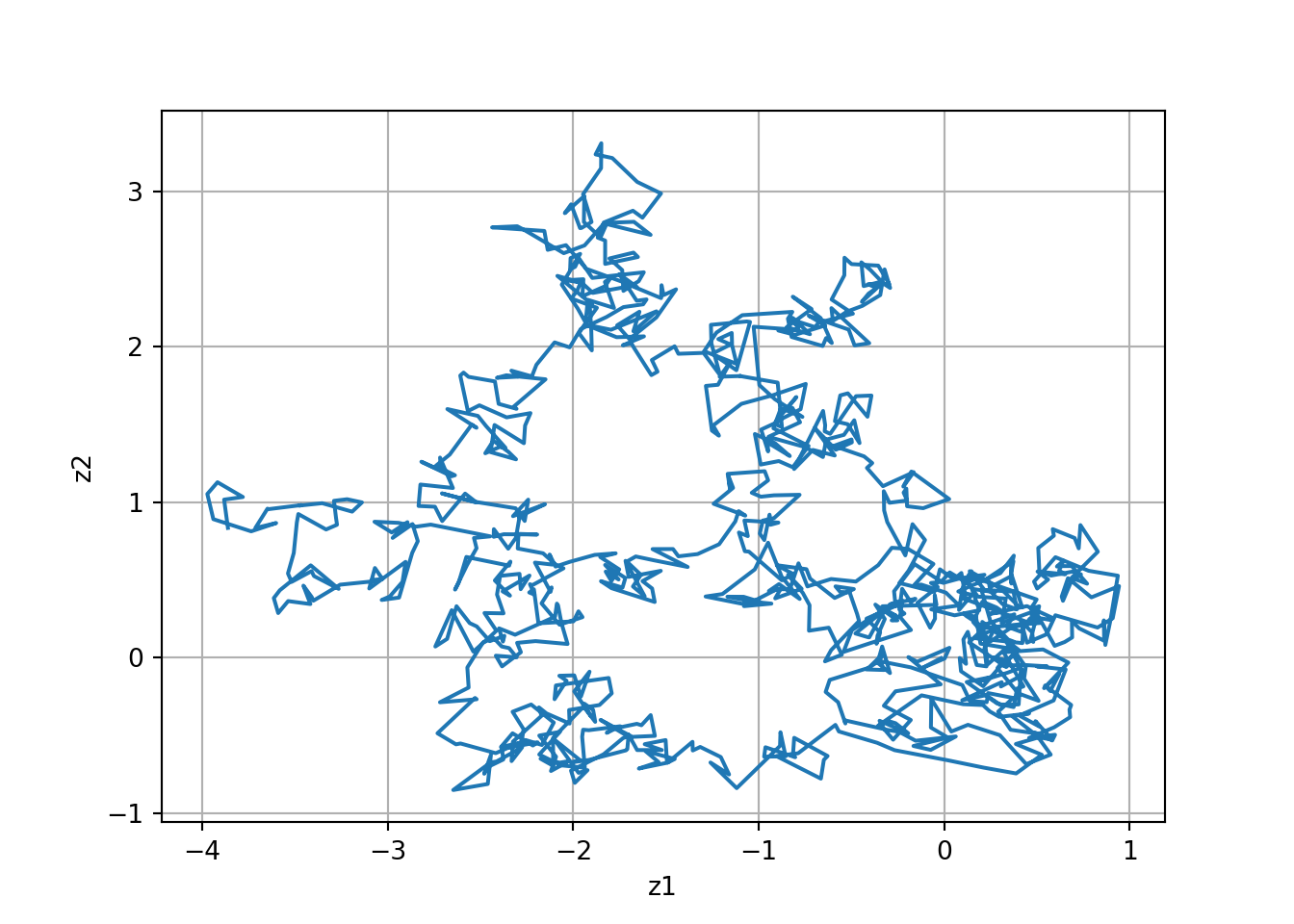
- This code produced the figure on the right when using the same $w$ and $v$ as prior slide; results are indistinguishable
### Converting the nearly-constant-velocity model
- We now consider a discrete-time version of the continuous time nearly-constant-velocity model.
- Recall the 2-d continuous-time state equation:
$$
\dot{x}(t) =
\underbrace{
\begin{bmatrix}
0 & 1 & 0 & 0 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 1 \\
0 & 0 & 0 & 0
\end{bmatrix}
}_{A} x(t) +
\underbrace{
\begin{bmatrix}
0 & 0 \\
1 & 0 \\
0 & 0 \\
0 & 1 \\
\end{bmatrix}
}_{B} w(t)
$$
where we are again treating random input $w(t)$ in the same way we have discussed treating deterministic input $u(t)$ here.
- We will need to compute $A_d = e^{A \Delta t}$ and also $B_d = \int_0^{\Delta t} e^{A \tau} B \, d\tau$
### Computing NCV $A_d$
The discrete-time $A$ matrix is $A_d = e^{A \Delta t}$
$$
\begin{aligned}
A_d &= \mathcal{L}^{-1} \left . \left\{ (sI - A)^{-1} \right\} \right |_{t=\Delta t} \\
&= \mathcal{L}^{-1} \left . \left\{
\begin{bmatrix}
s & -1 & 0 & 0 \\
0 & s & 0 & 0 \\
0 & 0 & s & -1 \\
0 & 0 & 0 & s
\end{bmatrix}^{-1}
\right\} \right |_{t=\Delta t} \\
&=
\mathcal{L}^{-1} \left . \left\{
\begin{bmatrix}
\frac{1}{s} & \frac{1}{s^2} & 0 & 0 \\
0 & \frac{1}{s} & 0 & 0 \\
0 & 0 & \frac{1}{s} & \frac{1}{s^2} \\
0 & 0 & 0 & \frac{1}{s}
\end{bmatrix}
\right\} \right |_{t=\Delta t} \\
&= \begin{bmatrix}
1 & \Delta t & 0 & 0 \\
0 & 1 & 0 & 0 \\
0 & 0 & 1 & \Delta t \\
0 & 0 & 0 & 1
\end{bmatrix}
\end{aligned}
$$ {#eq-rpk8dd}
- This can be verified in Octave using the “symbolic” package
This code require `sympy` in Python and `symbolic` package in Octave, which are not part of the default installation. You may need to install these packages before running the code below.
::: {.panel-tabset}
#### Octave🎶
```octave
#| label: lst-computing-NVC-Ad-oct
#| lst-cap: "Computing the discrete-time A matrix for the NCV model using Octave's symbolic package."
pkg load symbolic
syms dT
A = [0 1 0 0; 0 0 0 0; 0 0 0 1; 0 0 0 0];
Ad = expm ( A * dT )
```
#### Python🐍 {.active}
```{python}
#| label: lst-computing-NCV-Ad-py
#| lst-cap: "Computing the discrete-time A matrix for the NCV model using Python's sympy package."
#| output: asis
import sympy as sp
# symbolic timestep
dT = sp.Symbol("dT", real=True)
# system matrix A (4x4)
A = sp.Matrix([
[0, 1, 0, 0],
[0, 0, 0, 0],
[0, 0, 0, 1],
[0, 0, 0, 0],
])
# discrete-time state transition matrix
Ad = sp.exp(A * dT) # matrix exponential
# pretty print
##sp.pprint(Ad)
latex_Ad = sp.latex(Ad) # Ad is a sympy Matrix
print(r"$$A_d = " + sp.latex(Ad, mat_str="pmatrix") + r"$$") # knit R compatible LaTeX output
```
:::
### Computing NCV $B_d$
Note that $A$ is not invertible, so we cannot use the *simple* method to find $B_d$ ; instead, we need to use the more general integration approach:
$$
\begin{aligned}
B_d &= \int_0^{\Delta t} e^{A \tau} B \, d\tau \\
&= \int_0^{\Delta t} \begin{bmatrix}
1 & \tau & 0 & 0 \\
0 & 1 & 0 & 0 \\
0 & 0 & 1 & \tau \\
0 & 0 & 0 & 1
\end{bmatrix} \begin{bmatrix}
0 & 0 \\
1 & 0 \\
0 & 0 \\
0 & 1
\end{bmatrix} d\tau \\
&= \int_0^{\Delta t} \begin{bmatrix}
\tau & 0 \\
1 & 0 \\
0 & \tau \\
0 & 1
\end{bmatrix} d\tau \\
&= \begin{bmatrix}\frac{1}{2} \Delta t^2 & 0 \\
\Delta t & 0 \\
0 & \frac{1}{2} \Delta t^2 \\
0 & \Delta t
\end{bmatrix}
\end{aligned}
$$ {#eq-9l8h7o}
- This can also be verified in Octave using the “symbolic” package,
::: {.panel-tabset}
#### Octave 🎶
```octave
#| label: lst-computing-NCV-Bd-oct
#| lst-cap: "Computing the discrete-time B matrix for the NCV model using Octave's symbolic package."
#|
pkg load symbolic
syms sigma dT
A = [0 1 0 0; 0 0 0 0; 0 0 0 1; 0 0 0 0];
B = [0 0; 1 0; 0 0; 0 1];
z = expm ( A * sigma ) ;
Bd = int (z ,0 , dT ) * B
```
#### Python🐍 {.active}
```{python}
#| label: lst-computing-NCV-Bd-py
#| lst-cap: "Computing the discrete-time B matrix for the NCV model using Python's sympy package."
#| output: asis
import sympy as sp
#from IPython.display import display, Math
# symbols
sigma, dT = sp.symbols("sigma dT", real=True)
# matrices
A = sp.Matrix([
[0, 1, 0, 0],
[0, 0, 0, 0],
[0, 0, 0, 1],
[0, 0, 0, 0],
])
B = sp.Matrix([
[0, 0],
[1, 0],
[0, 0],
[0, 1],
])
z = sp.exp(A * sigma) # SymPy matrix exponential
# Bd = ∫_0^{dT} expm(A*sigma) dσ * B
Bd = sp.integrate(z, (sigma, 0, dT)) * B
Bd = sp.simplify(Bd)
#sp.pprint(Bd)
latex_Bd = sp.latex(Bd) # Bd is a sympy Matrix
#display(Math(r"B_d = " + sp.latex(Bd, mat_str="pmatrix"))) # Jupyter display (not knit compatible)
print(r"$$B_d = " + sp.latex(Bd, mat_str="pmatrix") + r"$$") # knit R compatible LaTeX output
```
:::
### Rescaling the discrete-time NCV model
- Again, we often state the discrete-time NCV model in terms of a 4-vector wk having rescaled components.
- So, the overall discrete-time NCV model is
$$
\begin{aligned}
x_{k+1} &= \begin{bmatrix}
1 & \Delta t & 0 & 0 \\
0 & 1 & 0 & 0 \\
0 & 0 & 1 & \Delta t \\
0 & 0 & 0 & 1
\end{bmatrix} x_k + w_k \\
z_k &= \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} x_k + v_k
\end{aligned}
$$
- Remembering the meaning of the xk components, this is stating (what we expect!):
$$\begin{aligned}
\varepsilon_k= \varepsilon_{k-1} + \Delta t \dot{\varepsilon}_{k-1} + \text{noise} \\
{\eta}_k = {\eta}_{k-1} + \Delta t \dot{\eta}_{k-1} + \text{noise}
\end{aligned}
$$
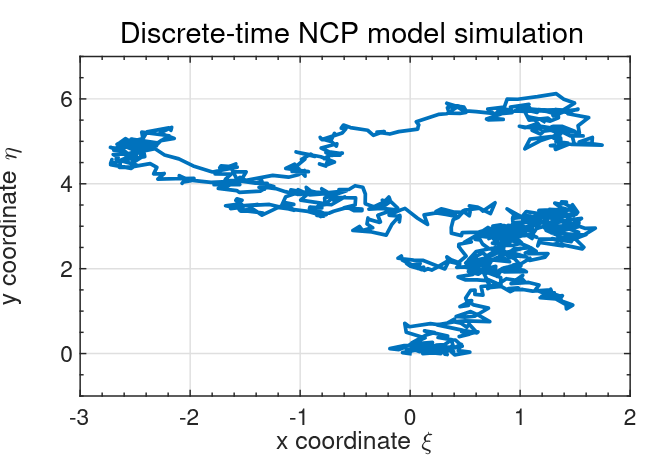
### NCV Time (dynamic) response using toolbox
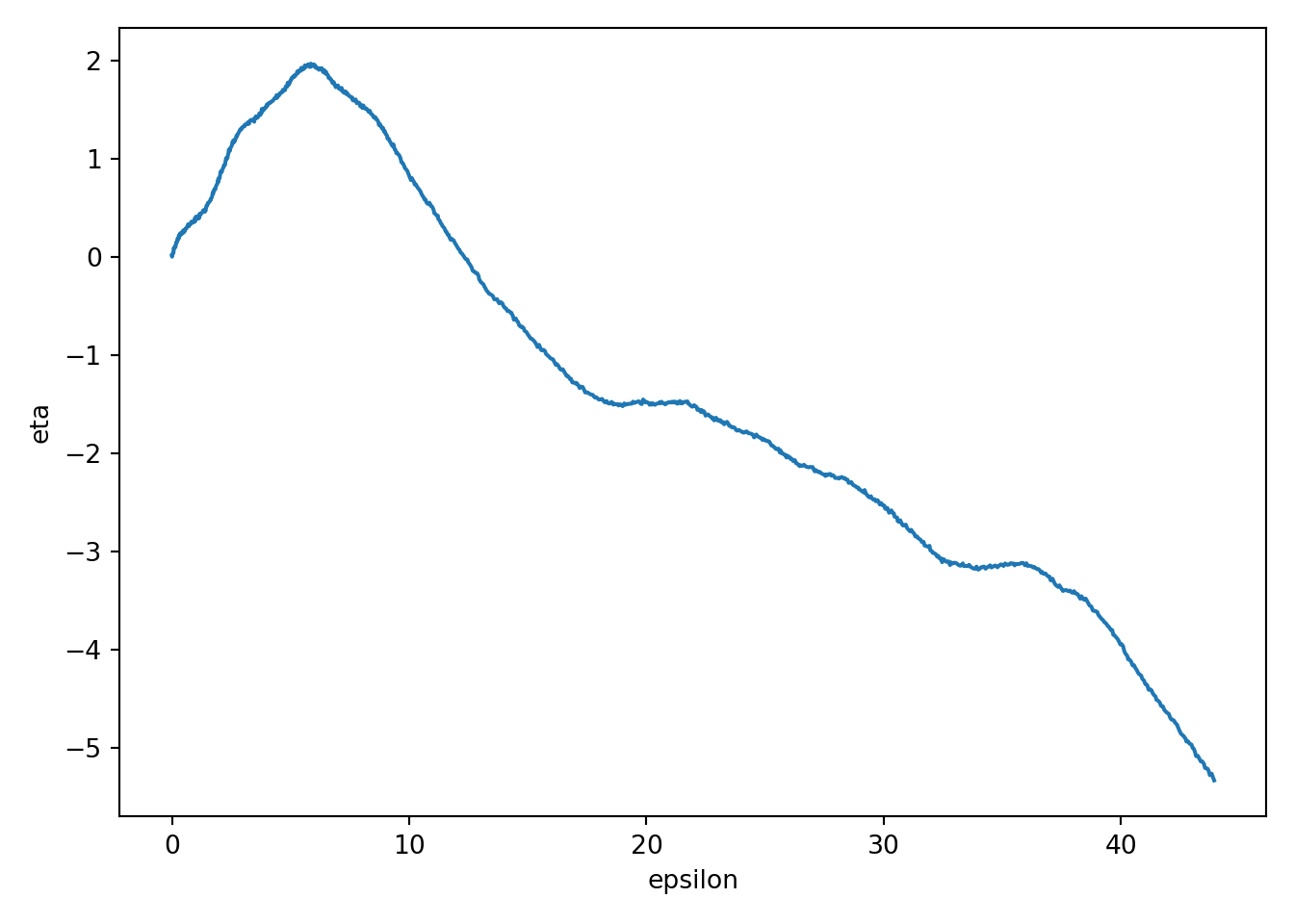
- Let us first consider simulating an NCP model using `lsim`.
- Figure on the right shows the output from using the toolbox methods.
::: {.panel-tabset}
#### Octave 🎶
```{octave, results="asis",echo=TRUE}
#| label: fig-l126-NCV-Toolbox-oct
#| fig-cap: "Discrete-time NCV model simulation."
pkg load control;
maxT = 1000; % # simulation steps
dT = 0.1; % sample period
A = [1 dT 0 0; 0 1 0 0; 0 0 1 dT; 0 0 0 1];
Bw = [dT^2/2 0; dT 0; 0 dT^2/2; 0 dT];
C = [1 0 0 0; 0 0 1 0];
D = zeros(2);
randn("seed", 123);
w = 0.1 * randn(maxT, 2); % (T x 2)
v = 0.01 * randn(maxT, 2); % (T x 2)
x0 = [0; 0.1; 0; 0.1]; % (4 x 1)
ncv = ss(A, Bw, C, D, dT); % discrete-time
z = lsim(ncv, w, [], x0) + v; % (T x 2)
plot(z(:,1), z(:,2));
xlabel("epsilon"); ylabel("eta");
```
#### Python 🐍 {.active}
```{python}
#| label: fig-l126-NCV-Toolbox-py
#| fig-cap: "Discrete-time NCV model simulated using the toolbox methods."
import numpy as np
import matplotlib.pyplot as plt
from scipy import signal
# --- Model ---
maxT = 1000 # simulation steps
dT = 0.1 # sample period
A = np.array([[1, dT, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, dT],
[0, 0, 0, 1]], dtype=float)
Bw = np.array([[dT**2/2, 0],
[dT, 0],
[0, dT**2/2],
[0, dT]], dtype=float)
C = np.array([[1, 0, 0, 0],
[0, 0, 1, 0]], dtype=float)
D = np.zeros((2, 2), dtype=float)
# --- Noise + initial state ---
rng = np.random.default_rng(123)
w = 0.1 * rng.standard_normal((maxT, 2)) # process noise input u_k
v = 0.01 * rng.standard_normal((maxT, 2)) # measurement noise
x0 = np.array([0, 0.1, 0, 0.1], dtype=float)
# --- Discrete-time state-space + simulation ---
sys = signal.dlti(A, Bw, C, D, dt=dT)
t = np.arange(maxT) * dT
# SciPy returns (t_out, y_out, x_out). For MIMO, y_out is (T, ny).
t_out, y, x = signal.dlsim(sys, u=w, t=t, x0=x0)
z = y + v # (T x 2)
# --- Plot ---
plt.figure()
plt.plot(z[:, 0], z[:, 1])
plt.xlabel("epsilon")
plt.ylabel("eta")
plt.tight_layout()
plt.show()
```
:::
### Time (dynamic) response using direct method
- In discrete-time we can implement the model without `lsim`.
- We again use a 'for' loop to implement the state-equation recursion directly.
::: {.panel-tabset}
#### Octave 🎶
```{octave, results="asis",echo=TRUE}
#| label: fig-l126-NCV-Direct-oct
#| fig-cap: "Discrete-time NCV model simulated using the direct method."
maxT = 1000; % simulation steps
dT = 0.1; % sample period
A = [1 dT 0 0; 0 1 0 0; 0 0 1 dT; 0 0 0 1];
Bw = [dT^2/2 0; dT 0; 0 dT^2/2; 0 dT];
C = [1 0 0 0; 0 0 1 0];
D = zeros(2);
randn("seed", 123);
w = 0.1 * randn(maxT, 2); % (T x 2)
v = 0.01 * randn(2, maxT); % (2 x T) ✅ match C*x
x0 = [0; 0.1; 0; 0.1]; % ✅ define initial state (x, vx, y, vy)
% Simulate directly
x = zeros(4, maxT);
x(:,1) = x0;
for k = 2:maxT
x(:,k) = A * x(:,k-1) + Bw * w(k-1,:)'; % note w row -> column
end
z = C * x + v; % (2 x T)
plot(z(1,:), z(2,:));
xlabel("x"); ylabel("y");
```
#### Python 🐍 {.active}
```{python}
#| label: fig-l126-NCV-Direct-py
#| fig-cap: "Discrete-time NCV model simulated using the direct method."
import numpy as np
import matplotlib.pyplot as plt
# --- Parameters ---
maxT = 1000
dT = 0.1
A = np.array([[1, dT, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, dT],
[0, 0, 0, 1]], dtype=float)
Bw = np.array([[dT**2/2, 0],
[dT, 0],
[0, dT**2/2],
[0, dT]], dtype=float)
C = np.array([[1, 0, 0, 0],
[0, 0, 1, 0]], dtype=float)
# --- Randomness (Octave-like seeding intent) ---
rng = np.random.default_rng(123)
w = 0.1 * rng.standard_normal((maxT, 2)) # (T x 2)
v = 0.01 * rng.standard_normal((2, maxT)) # (2 x T)
x0 = np.array([0, 0.1, 0, 0.1], dtype=float) # (4,)
# --- Direct simulation ---
x = np.zeros((4, maxT), dtype=float)
x[:, 0] = x0
for k in range(1, maxT):
x[:, k] = A @ x[:, k-1] + Bw @ w[k-1, :]
z = C @ x + v # (2 x T)
# --- Plot ---
plt.figure()
plt.plot(z[0, :], z[1, :])
plt.xlabel("x")
plt.ylabel("y")
plt.tight_layout()
plt.show()
```
:::
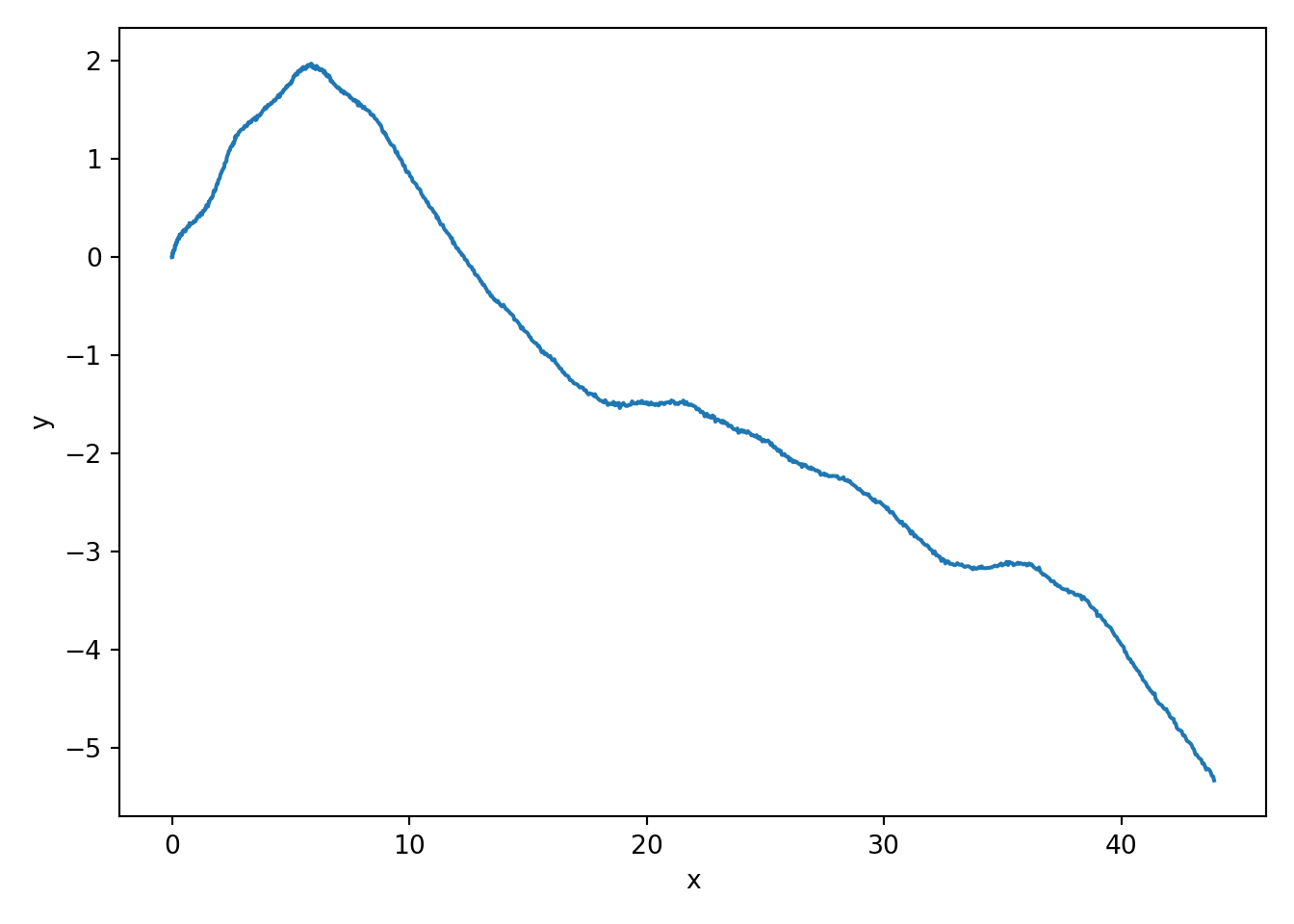
- This code produced the figure on the right when using the same $w$ and $v$ as prior slide; results are indistinguishable.
### Converting the coordinated-turn model
- Similarly, it can be shown that the discrete-time coordinated
turn model in 2-d is:
xk D2
6
6
41 sin.ĩt /= 0 .cos.ĩt/ 1/=
0 cos.ĩt / 0 sin.ĩt /
0 .1 cos.ĩt //= 1 sin.ĩt/=
0 sin.ĩt/ 0 cos.ĩt /3
7
7
5 xk1C2
6
6
4.1 cos.ĩt //=2 .sin.ĩt/ ĩt/=2sin.ĩt/= .cos.ĩt / 1/=
.ĩt sin.ĩt//=2 .1 cos.ĩt //=2.1 cos.ĩt //= sin.ĩt/=3
7
7
5 wk1 ́k D� 1 0 0 0
0 0 1 0�xk C vk
$$
\begin{aligned}
x_k &= \begin{bmatrix} 1 & \frac{\sin(\Omega \Delta t)}{\Omega} & 0 & \frac{\cos(\Omega \Delta t) - 1 }{\Omega}\\
0 & \cos(\Omega \Delta t) & 0 & -\sin(\Omega \Delta t) \\
0 & \frac{1 - \cos(\Omega \Delta t)}{\Omega} & 1 & \frac{\sin(\Omega \Delta t)}{\Omega} \\
0 & \sin(\Omega \Delta t) & 0 & \cos(\Omega \Delta t) \end{bmatrix} x_{k-1} + \begin{bmatrix} \frac{1 - \cos(\Omega \Delta t)}{\Omega} & \frac{\sin(\Omega \Delta t)}{\Omega} \\
\sin(\Omega \Delta t) & \frac{1 - \cos(\Omega \Delta t)}{\Omega} \\
\frac{1 - \cos(\Omega \Delta t)}{\Omega} & \frac{\sin(\Omega \Delta t)}{\Omega} \\
\sin(\Omega \Delta t) & \frac{1 - \cos(\Omega \Delta t)}{\Omega} \end{bmatrix} w_{k-1} \\
z_k &= \begin{bmatrix} 1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 \end{bmatrix} x_k + v_k
\end{aligned}
$$ {#eq-jlbdkh}
### CT Time (dynamic) response using toolbox
- Let’s first consider simulating an CT model using `lsim`
::: {.panel-tabset}
#### Octave 🎶
```octave
#| label: fig-l126-CT-Toolbox-oct
#| fig-cap: "Continuous-time CT model simulated using the toolbox methods."
%% Simulate the CT model using lsim
maxT = 1000; % # sim . steps
randn("seed", 123);
w = 0.01* randn (2 , maxT ) ; % rand input
v = 0.01* randn (2 , maxT ) ;
x0 = [0;0.1;0;0.1]; % init state
dT = 0.1; W = 0.1; WT = W * dT ;
sW = sin ( WT ) ; cW = cos ( WT ) ;
A = [1 sW / W 0 ( cW -1) / W ; 0 cW 0 - sW ;
0 (1 - cW ) / W 1 sW / W ; 0 sW 0 cW ];
Bw = [(1 - cW ) / W ^2 , ( sW - WT ) / W ^2;
sW /W , ( cW -1) / W ;
( WT - sW ) / W ^2 , (1 - cW ) / W ^2;
(1 - cW ) /W , sW / W ];
C = [1 0 0 0; 0 0 1 0];
D = zeros(2);
ct = ss(A , Bw ,C ,D , dT);
z = lsim( ct ,w ,[] , x0 ) +v';
plot (z(:,1) ,z(:,2) ) ;
```
#### Python 🐍 {.active}
```{python}
#| label: fig-l126-CT-Toolbox-py
#| fig-cap: "Continuous-time CT model simulated using the toolbox methods."
```
:::
### CT Time (dynamic) response using direct method
{#fig-l126-CT-Direct-oct .column-margin group="slides" width="53mm"}
- In discrete-time we can implement the model without `lsim`.
- We again use a “for” loop to implement the state-equation recursion directly.
::: {.panel-tabset}
{#fig-l126-CT-Direct-oct .column-margin group="slides" width="53mm"}
#### Octave 🎶
```octave
#| label: fig-l126-CT-Direct-oct
#| fig-cap: "Continuous-time CT model simulated using the direct method."
%% Simulate the CT model using direct method
maxT = 1000; % # sim . steps
randn("seed", 123);
w = 0.01* randn (2 , maxT ) ; % rand input
v = 0.01* randn (2 , maxT ) ;
x0 = [0;0.1;0;0.1]; % init state
dT = 0.1; W = 0.1; WT = W * dT ;
sW = sin ( WT ) ; cW = cos ( WT ) ;
A = [1 sW / W 0 ( cW -1) / W ; 0 cW 0 - sW ;
0 (1 - cW ) / W 1 sW / W ; 0 sW 0 cW ];
Bw = [(1 - cW ) / W ^2 , ( sW - WT ) / W ^2;
sW /W , ( cW -1) / W ;
( WT - sW ) / W ^2 , (1 - cW ) / W ^2;
(1 - cW ) /W , sW / W ];
C = [1 0 0 0; 0 0 1 0];
D = zeros(2);
%% Simulate the CT model directly
% Assume A , Bw ,C ,D , maxT , x0 ,w , v defined
x = zeros (4 , maxT ) ; % storage for x
x (: ,1) = x0 ; % init state
for k =2: maxT % simulate model
x (: , k ) = A * x (: ,k -1) + Bw * w (: ,k -1) ;
end
z = C * x + v ;
plot ( z (1 ,:) ,z (2 ,:) ) ;
```
:::
### Summary
{#fig-kf-022 .column-margin group="slides" width="53mm"}
{#fig-kf-023 .column-margin group="slides" width="53mm"}
- In this lesson, you learned two different ways to simulate discrete-time models in Octave: toolbox and direct.
- Both methods produce identical results; which one you use is mainly a matter of preference.
- You also learned how to convert NCP, NCV, and CT continuous-time models into discrete-time models.
- Note that the continuous-time models and discrete-time models produce identical computations at the sample points, but different values in-between sample points (technically, the discrete-time state and output are not defined in-between sample points).