Lecture 7b: Training RNNs with back propagation
Most important prerequisites to perhaps review: videos 3d and 5c (about backprop with weight sharing).
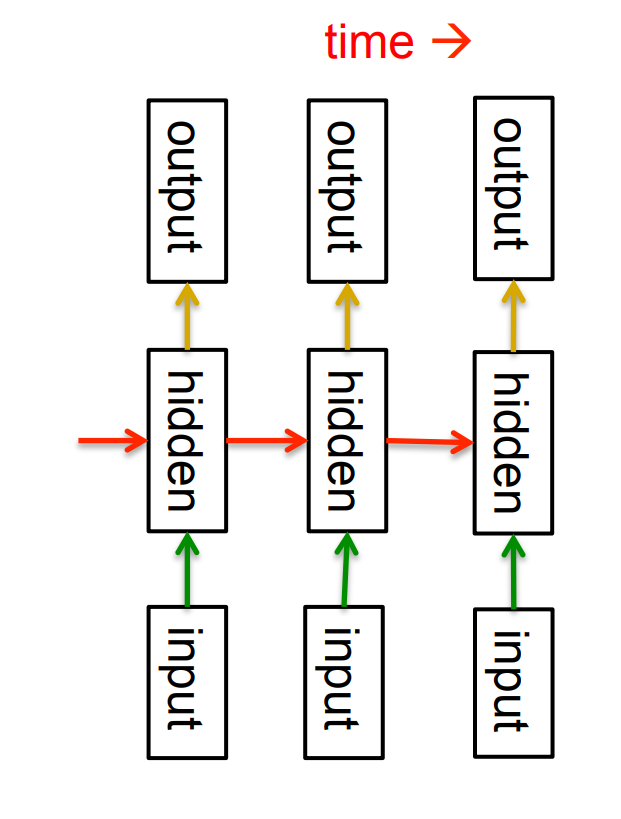
After watching the video, think about how such a system can be used to implement the brain of a robot as it’s producing a sentence of text, one letter at a time.
What would be input; what would be output; what would be the training signal; which units at which time slices would represent the input & output?
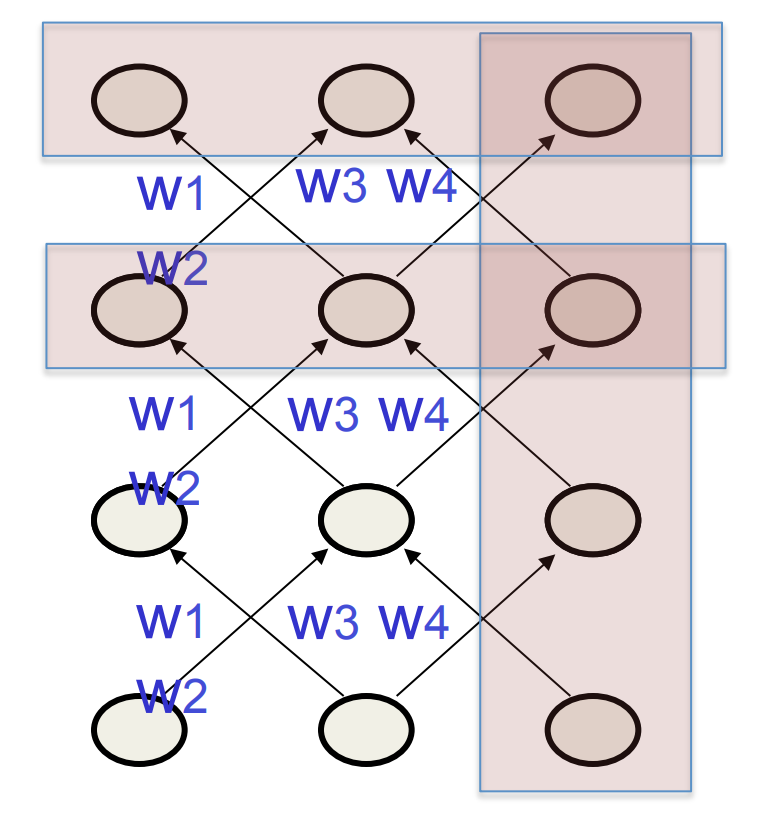
The equivalence between feedforward nets and recurrent nets
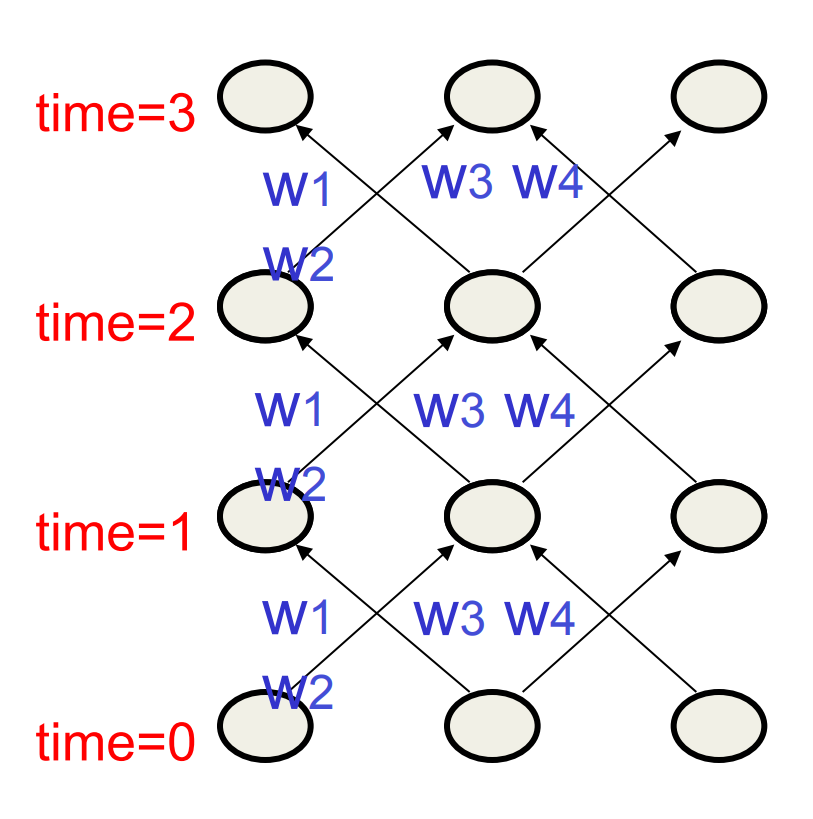
Assume that there is a time delay of 1 in using each connection.
The recurrent net is just a layered net that keeps reusing the same weights.
Reminder: Backpropagation with weight constraints
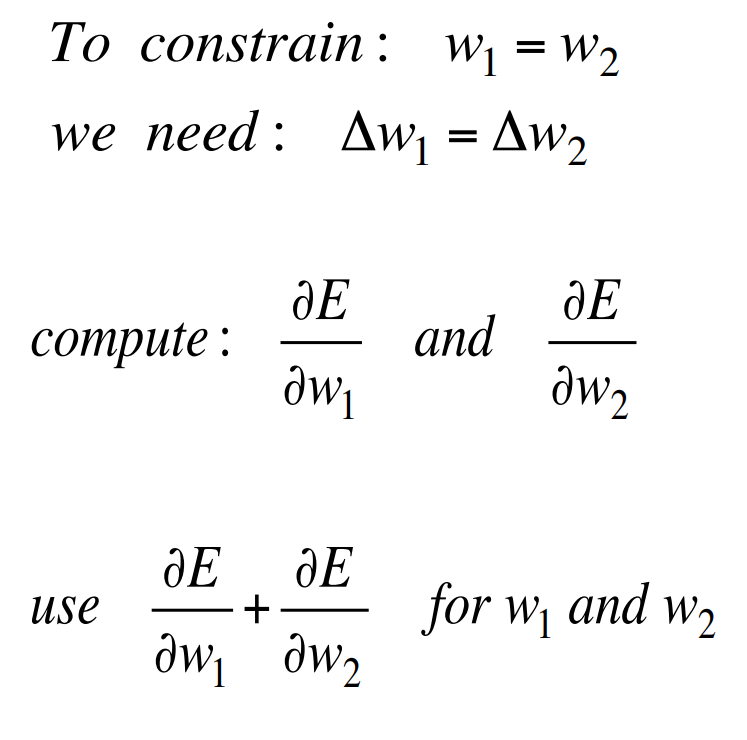
- It is easy to modify the backprop algorithm to incorporate linear constraints between the weights.
- We compute the gradients as usual, and then modify the gradients so that they satisfy the constraints.
- So if the weights started off satisfying the constraints, they will continue to satisfy them.
Backpropagation through time
- We can think of the recurrent net as a layered, feed-forward net with shared weights and then train the feed-forward net with weight constraints.
- We can also think of this training algorithm in the time domain:
- The forward pass builds up a stack of the activities of all the units at each time step.
- The backward pass peels activities off the stack to compute the error derivatives at each time step.
- After the backward pass we add together the derivatives at all the different times for each weight.
An irritating extra issue
- We need to specify the initial activity state of all the hidden and output units.
- We could just fix these initial states to have some default value like 0.5.
- But it is better to treat the initial states as learned parameters.
- We learn them in the same way as we learn the weights.
- Start off with an initial random guess for the initial states.
- At the end of each training sequence, backpropagate through time all the way to the initial states to get the gradient of the error function with respect to each initial state.
- Adjust the initial states by following the negative gradient.
Providing input to recurrent networks
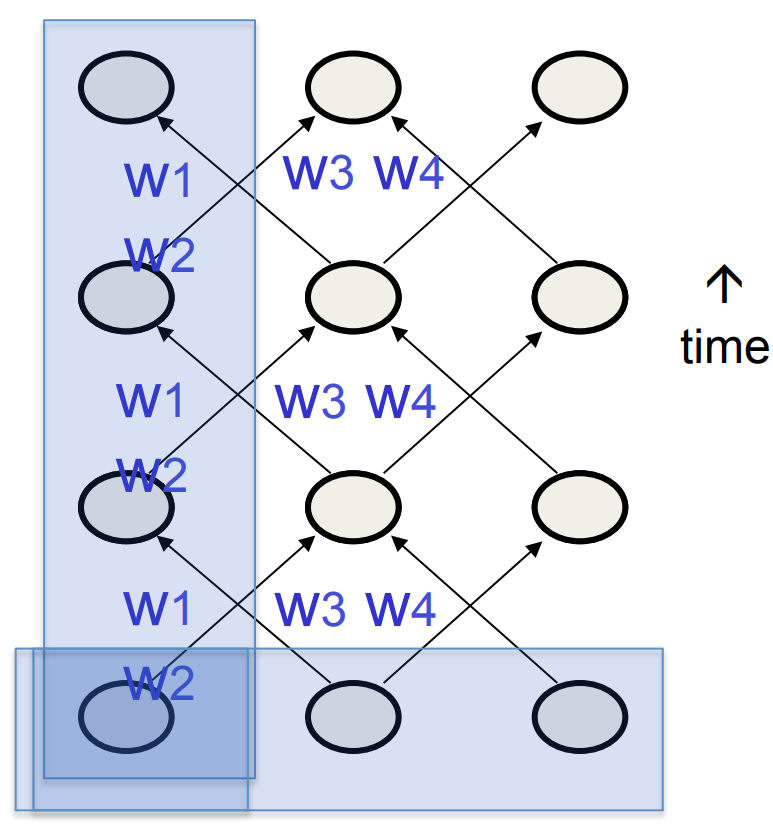
- We can specify inputs in several ways:
- Specify the initial states of all the units.
- Specify the initial states of a subset of the units.
- Specify the states of the same subset of the units at every time step.
- This is the natural way to model most sequential data.
Teaching signals for recurrent networks
- We can specify targets in several ways:
- Specify desired final activities of all the units
- Specify desired activities of all units for the last few steps
- Good for learning attractors
- It is easy to add in extra error derivatives as we backpropagate.
- Specify the desired activity of a subset of the units.
- The other units are input or hidden units.
Reuse
CC SA BY-NC-ND
Citation
BibTeX citation:
@online{bochman2017,
author = {Bochman, Oren},
title = {Deep {Neural} {Networks} - {Notes} for {Lesson} 7b},
date = {2017-09-03},
url = {https://orenbochman.github.io/notes/dnn/dnn-07/l07b.html},
langid = {en}
}
For attribution, please cite this work as:
Bochman, Oren. 2017. “Deep Neural Networks - Notes for Lesson
7b.” September 3, 2017. https://orenbochman.github.io/notes/dnn/dnn-07/l07b.html.