{{< pdf lec6.pdf >}}
Lecture 6a: Overview of mini-batch gradient descent
Now we’re going to discuss numerical optimization: how best to adjust the weights and biases, using the gradient information from the backprop algorithm.
This video elaborates on the most standard neural net optimization algorithm (mini-batch gradient descent), which we’ve seen before.
We’re elaborating on some issues introduced in video 3e.
Reminder: The error surface for a linear neuron
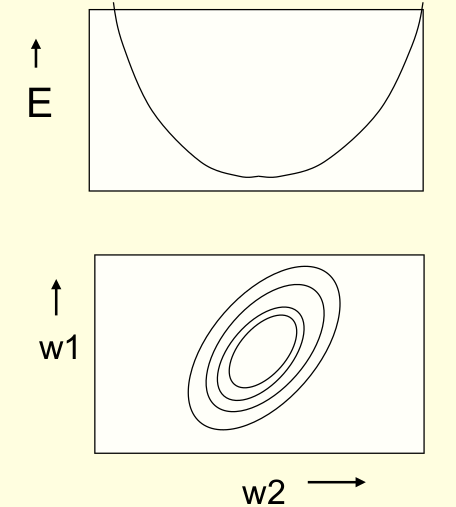
- The error surface lies in a space with a horizontal axis for each weight and one vertical axis for the error.
- For a linear neuron with a squared error, it is a quadratic bowl.
- Vertical cross-sections are parabolas.
- Horizontal cross-sections are ellipses.
- For multi-layer, non-linear nets the error surface is much more complicated.
- But locally, a piece of a quadratic bowl is usually a very good approximation.
Convergence speed of full batch learning when the error surface is a quadratic bowl

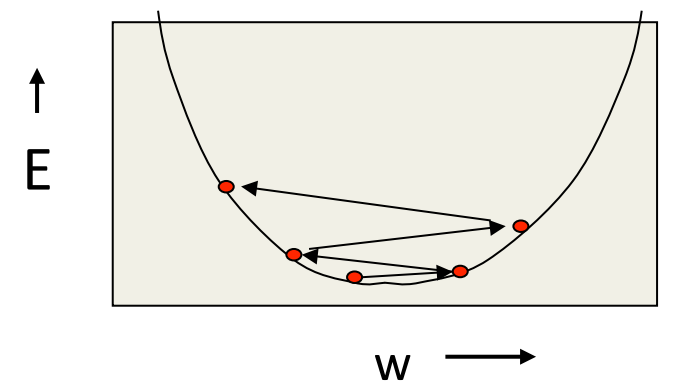
- Going downhill reduces the error, but the direction of steepest descent does not point at the minimum unless the ellipse is a circle.
- The gradient is big in the direction in which we only want to travel a small distance.
- The gradient is small in the direction in which we want to travel a large distance.
- The gradient is big in the direction in which we only want to travel a small distance.
- Even for non-linear multi-layer nets, the error surface is locally quadratic, so the same speed issues apply.
How the learning goes wrong
- If the learning rate is big, the weights slosh to and fro across the ravine.
- If the learning rate is too big, this oscillation diverges.
- What we would like to achieve:
- Move quickly in directions with small but consistent gradients.
- Move slowly in directions with big but inconsistent gradients.
Stochastic gradient descent SGD
- If the dataset is highly redundant, the gradient on the first half is almost identical to the gradient on the second half.
- So instead of computing the full gradient, update the weights using the gradient on the first half and then get a gradient for the new weights on the second half.
- The extreme version of this approach updates weights after each case. Its called online.
- Mini-batches are usually better than online.
- Less computation is used updating the weights.
- Computing the gradient for many cases simultaneously uses matrix-matrix multiplies which are very efficient, especially on GPUs
- Mini-batches need to be balanced for classes
Two types of learning algorithm
- If we use the full gradient computed from all the training cases, there are many clever ways to speed up learning (e.g. non-linear conjugate gradient).
- The optimization community has studied the general problem of optimizing smooth non-linear functions for many years.
- Multilayer neural nets are not typical of the problems they study so their methods may need a lot of adaptation.
- The optimization community has studied the general problem of optimizing smooth non-linear functions for many years.
- For large neural networks with very large and highly redundant training sets, it is nearly always best to use mini-batch learning.
- The mini-batches may need to be quite big when adapting fancy methods.
- Big mini-batches are more computationally efficient.
A basic mini-batch gradient descent algorithm
- Guess an initial learning rate.
- If the error keeps geang worse or oscillates wildly, reduce the learning rate.
- If the error is falling fairly consistently but slowly, increase the learning rate.
- Write a simple program to automate this way of adjusting the learning rate.
- Towards the end of mini-batch learning it nearly always helps to turn down the learning rate.
- This removes fluctuations in the final weights caused by the variations between minibatches.
- This removes fluctuations in the final weights caused by the variations between minibatches.
- Turn down the learning rate when the error stops decreasing.
- Use the error on a separate validation set
Reuse
CC SA BY-NC-ND
Citation
BibTeX citation:
@online{bochman2017,
author = {Bochman, Oren},
title = {Deep {Neural} {Networks} - {Notes} for Lecture 6a},
date = {2017-08-24},
url = {https://orenbochman.github.io/notes/dnn/dnn-06/l06a.html},
langid = {en}
}
For attribution, please cite this work as:
Bochman, Oren. 2017. “Deep Neural Networks - Notes for Lecture
6a.” August 24, 2017. https://orenbochman.github.io/notes/dnn/dnn-06/l06a.html.